Motora vadība kā strāvas funkcija
 Motora vadību var veikt atkarībā no statora strāvas stipruma. Iedarbināšanas ķēde kā rotora indukcijas motora strāvas funkcija ir parādīta attēlā. 1 a.
Motora vadību var veikt atkarībā no statora strāvas stipruma. Iedarbināšanas ķēde kā rotora indukcijas motora strāvas funkcija ir parādīta attēlā. 1 a.
Iedarbināšanas brīdī strāva sasniedz vērtību I1, un pēc noteikta laika intervāla tā samazinās līdz vērtībai I2 (b att.). Šajā brīdī daļa no starta pretestības rotora ķēdē tiek automātiski īssavienota, strāva paaugstinās līdz vērtībai I1, pēc tam atkal samazinās līdz vērtībai I2, kas izraisa īssavienojumu vēl vienai starta pretestības daļai. Šo procesu atkārto, līdz tiek īssavienoti visi palaišanas pretestības posmi. Šiem nolūkiem tiek izmantots pārslodzes relejs, kura tinumi ir iekļauti motora strāvas ķēdē.
Kad jūs noklikšķiniet uz sākuma poga SB1 (skat. att. A) tiek aktivizēts kontaktors KM, kura galvenie kontakti savieno motoru ar tīklu pie kopējās starta pretestības rotora ķēdē. Šajā gadījumā jaudu saņem KA releja spole, kuras atvēršanas kontakti atrodas akseleratora spoles K1 ķēdē.KA relejs ir iestatīts tā, lai reakcijas laiks būtu īsāks nekā K1 kontaktoram. Turklāt tā sarauj kontaktus pie maksimālās pieļaujamās vērtības sākuma strāva atveras, un, strāvai samazinoties līdz ieslēgšanas vērtībai, tie atkal aizveras, kā rezultātā spole K1 tiek ieslēgta caur releja KA kontaktiem palaišanas pretestības posma īssavienojuma brīdī.
Relejs KA darbosies, pirms tiek aktivizēts paātrinājuma kontaktors K1, un motors paātrinās, kad palaišanas pretestība ir pilnībā ieviesta. Samazinoties palaišanas pārslēgšanas strāvai, KA releja kontakti aizvērsies un ieslēgsies spole K1. Tajā pašā laikā kontakts K1 aizveras, nodrošinot spoles pašbarošanu neatkarīgi no releja KA, un vadības ķēdes kontakts atveras, novēršot priekšlaicīgu akseleratora K2 iekļaušanu.
Tā kā barošanas kontakti K1 ir daļa no palaišanas pretestības īssavienojuma, statora strāva palielinās līdz maksimālajai vērtībai, un relejs KA, iedarbinot, atver kontaktus spoles K2 barošanas ķēdē. Kad motors sasniedz pietiekamu ātrumu un statora strāva nokrītas atpakaļ līdz pārslēgšanas strāvai, releja KA kontakti aizveras un ieslēgs spoli K2, kas īssavieno starta pretestības otro posmu ar tā kontaktiem.
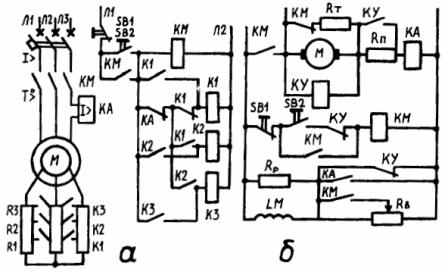
Rīsi. 1. Vadības shēmas atkarībā no strāvas: a — asinhronais motors ar fāzes rotoru; b — līdzstrāvas motors ar paralēlu ierosmi
Šajā gadījumā statora strāva atkal palielinās, KA relejs darbosies un atvērs savus kontaktus. Spole K2 nezaudēs jaudu, jo tai būs laiks aizvērties ar palīgkontaktiem K2.Turpmāka statora strāvas samazināšanās pēc nākamā paātrinājuma izraisīs tinuma K3 ieslēgšanos un īssavienojumu sākuma pretestības pēdējā posmā. Nospiežot pogu SB, motors tiek apturēts, un ķēde ir gatava nākamajai palaišanai. Izmantojot strāvas relejus, kas konfigurēti, lai atgrieztos ar strāvu 12, dažādas elektriskās piedziņas var apturēt un mainīt. Vadības ķēžu trūkums pašreizējā funkcijā ir diezgan liels kontaktu skaits.
Vairāku kilovatu paralēlas ierosmes līdzstrāvas motora neatgriezeniskai vadībai var izmantot vienu palaišanas reostata posmu (skat. C att.). Diagrammā parādīts: regulējoša pretestība RB ierosmes ķēdē; izlādes pretestība Rp savienota paralēli ierosmes spolei LM; bremzēšanas pretestība RT, kas savienota paralēli armatūrai M, kad tā ir atvienota no tīkla, un palaišanas pretestība RP, kas virknē savienota ar armatūras ķēdi palaišanas periodā. Lai palaišanas laikā radītu maksimālu plūsmu, LM lauka spole sākotnējā stāvoklī tiek ieslēgta ar pilnu spriegumu.
Nospiežot pogu SB2, motora armatūra no līnijas kontaktora KM tiek virknē savienota ar tīklu ar pretestību RP Startera vadības relejs SC darbojas kā armatūras strāvas funkcija. Palielinoties strāvai, KA aizvēršanas kontakts manipulē ar pretestību RB, palielinot ierosmes magnētisko plūsmu, un, strāvai samazinoties, atveras KA kontakts un LM spole tiek savienota virknē ar reostata RB pretestību, jo kurā magnētiskā strāva samazinās.
Kad motors tiek iedarbināts, palielināta palaišanas armatūras strāva ieslēdz KA releju un LM spole rada maksimālo plūsmu. Sasniedzot noteiktu ātrumu, tiek ieslēgts paātrinājuma kontaktors K, tiek īsslēgts palaišanas pretestība RP, pēc kura motors darbojas atbilstoši tā dabiskajām īpašībām. Kad armatūras strāva samazinās (motora paātrinājuma rezultātā), pirms ieslēdzas KA relejs, KA kontakts ierosmes ķēdē atvērsies.
LM tinums ieslēgsies virknē ar RB pretestību, izraisot lauka plūsmas vājināšanos un attiecīgi palielinot armatūras strāvu. KA relejs atkal darbosies, palielinot plūsmu un vienlaikus palielinot motora ātrumu. Palaišanas laikā kosmosa kuģa relejs tiek iedarbināts vairākas reizes, līdz motors sasniedz RB vadības reostata iestatīto ātrumu. Šāda vibrācijas ierīce, kas darbojas kā strāvas funkcija, vienkāršo ķēdi salīdzinājumā ar vadības ķēdēm kā laika funkciju.
Kad motors tiek ieslēgts, nospiežot pogu SB1, armatūra tiek ieslēgta no atvēršanas kontakta KM līdz bremzēšanas rezistoram RT un dinamiskā bremzēšana tiek veikta automātiski. Apstāšanās sākumā magnētiskais lauks ir nedaudz vājināts, jo tiek atvērts KM kontakts uz regulējošā reostata slīdņa, un ierosmes strāva iet cauri visai pretestībai RB. Motora ātrumam vēl vairāk samazinoties, paātrinājuma kontaktors K tiek atslēgts un plūsma palielinās, kad ierosmes spole caur atveres kontaktu K tiek ieslēgta uz pilnu līnijas spriegumu, kā rezultātā palielinās bremzēšanas moments.