Gaisa celtņu elektrisko piedziņu elektriskās ķēdes, kas darbinātas no grīdas
Jaucējkrānu diagrammas un aizsargfunkcijas
 Rūpniecībā zemas intensitātes transportēšanas un uzglabāšanas operācijās, mašīntelpās un laboratoriju telpās tiek izmantots liels skaits paceļamo celtņu, kas darbojas vai nu sporādiski, vai ar pacelšanas ciklu skaitu 6 - 10 stundā. Ir ekonomiski nepraktiski šādiem celtņiem izmantot pilnas slodzes operatorus. Tāpēc arvien vairāk paceļamo celtņu tiek darbināti no grīdas.
Rūpniecībā zemas intensitātes transportēšanas un uzglabāšanas operācijās, mašīntelpās un laboratoriju telpās tiek izmantots liels skaits paceļamo celtņu, kas darbojas vai nu sporādiski, vai ar pacelšanas ciklu skaitu 6 - 10 stundā. Ir ekonomiski nepraktiski šādiem celtņiem izmantot pilnas slodzes operatorus. Tāpēc arvien vairāk paceļamo celtņu tiek darbināti no grīdas.
No grīdas vadāmo tilta celtņu iezīme ir iespēja piekļūt celtnim remontam un kontrolei tikai īpaši izraudzītās vietās, kas aprīkotas ar piemērotām zonām mehānismu un elektrisko iekārtu pārbaudei. Tāpēc visa celtņa elektroiekārtu aizsardzības sistēma ir jākonstruē tā, lai avārijas apstākļos celtni varētu nogādāt uz remonta zonu kontrolējot no grīdas un ja ķēdē nav celtņa. īssavienojumi un zemējuma defekti.
Šajā sakarā uz grīdas darbināmiem celtņiem, automātiskie slēdži nav instalēti.Galvenās ķēdes ir aizsargātas ar automātisku barošanas slēdzi pamata ratiņiun vadības ķēžu aizsardzība — drošinātāji strāvām 15 A, 380 V ar vadības ķēžu vadītāju šķērsgriezumu 2,5 mm2. Tiek veikta mehānismu elektrisko piedziņu aizsardzība pret pārslodzi siltuma releji dzinēju galvenajās ķēdēs.
Lai jaucējkrāns varētu kustēties pēc termiskās aizsardzības iedarbināšanas, releja kontakti ir savienoti ar pogu vadības panelī. Vārsts ir aprīkots ar signāllampām sprieguma klātbūtnei pie ieejas, spriegumam pēc kontaktora līnijas aizsardzībai un signāllampu termiskās aizsardzības darbībai.
Gaisa celtņu kustības mehānismu elektriskās shēmas
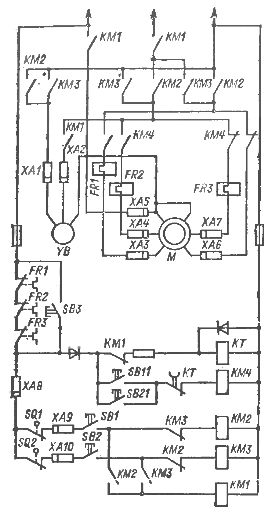
attēlā. 1 ir parādīta elektriskā piedziņas diagramma kustībā ar viena ātruma motora īssavienojuma vadību.
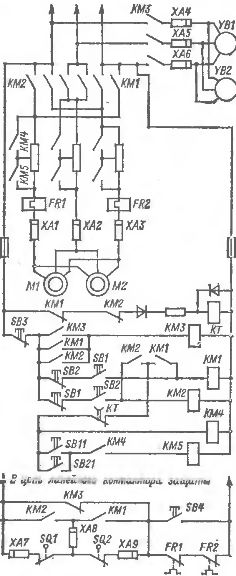
Rīsi. 1. Celtņa kustības mehānisma elektriskās piedziņas shēma (ar viena ātruma vāveres motoru), ja to darbina no grīdas: M1, M2 — elektromotori, YB1, YB2 — bremžu vai elektrohidraulisko stūmēju elektromagnēti, KM1, KM2 — virziena kontaktori, KM4, KM5 — rezistoru kontaktori ķēdes statoros, KMZ — bremžu kontaktors, KT — palaišanas laika relejs, FR1, FR2 — termoreleji, SQ1, SQ2 — gala slēdži, SB1, SB2 — kustības virziena pogas (divas). - ceļš), SB11, SB21 — starta pogas, SB3 — brīvas kustības apturēšanas poga, SB4 — termiskās aizsardzības apiešanas poga, XA1 — XA9 — strāvas pārvades ratiņu kontakti
Šī shēma ir paredzēta ratiņu celtņu piedziņai ar kravnesību 3-20 tonnas un celtņu piedziņas celtņiem ar kravnesību 2-5 tonnas.Vāveres motora statora tinumi tiek baroti no elektrotīkla caur diviem posmiem rezistori. Piedziņas mehāniskās īpašības ir parādītas attēlā. 2, a.
Elektriskās piedziņas vadība — no piekaramām pogām. Vadība ietver divas galvenās divvirzienu pogas SB1 un SB2, kas dod komandu pārvietoties divos virzienos. Pāreja uz pozīciju bez rezistoru regulēšanas tiek veikta, kad komandas tiek izdotas, izmantojot pogas SB11, SB21.
Kad dzinējs ir ieslēgts, YB bremžu piedziņas strāva tiek piegādāta caur kontaktoru KM1, KM2 kontaktiem caur KMZ kontaktiem. Pēc elektromotora izslēgšanas bremžu piedziņa turpina saņemt jaudu un mehānismam ir brīva gaita.Bremzes atlaišanai izmantojiet pogu SB3, kas ir kopīga ratiņiem un ass mehānismam. Kad tiek aktivizēts gala slēdži SQ1 un SQ2, aizsarglīnijas kontaktors tiek atslēgts un uzlikts mehāniskās bremzes.
Lai nodrošinātu elektrību pretējā bremzēšana pēc bezmaksas sāknēšanas izmantošanas laika stafete CT ar laika aizkavi 2-3 s, kas palēnina piedziņu līdz pozīcijai ar minimālu palaišanas (bremzēšanas) griezes momentu.
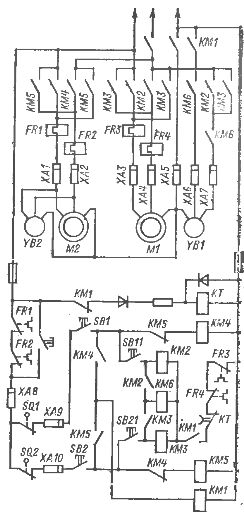
attēlā. 3 parādīta elektriskās piedziņas shēma gaisvadu celtņa (ratiņu) kustībai ar palīdzību divu ātrumu vāveres korpusa motori… Motoram ir divi atsevišķi tinumi ar polu attiecību



Poga SB1 vai SB2 ietver virziena kontaktorus KM1, KM2, kā arī zema ātruma kontaktoru KM4. Pēc strāvas padeves motora zema ātruma tinumam caur kontaktoru KMZ bremžu pievads YB1, YB2 saņem jaudu.Lai pārslēgtos uz lielu ātrumu, divvirzienu pogas SB aizver kontaktus SB11, SB21 (otrā pozīcija) un ieslēdz kontaktoru KM6.
Ātrgaitas spole ir savienota ar tīklu caur rezistoru vienlaikus ar zema ātruma spoli. Pēc tam tiek izslēgta zema ātruma spole. Pēc KT releja laika aizkaves (2-5 s) kontaktors KM5 ieslēdzas un motors sasniedz savu ātrgaitas režīma dabisko raksturlielumu (2. att., b).
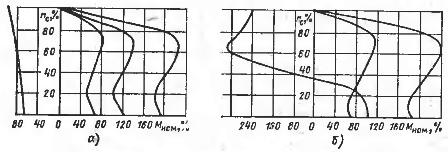
Rīsi. 2. Diagrammu mehāniskie raksturlielumi att. 13
Kad motors ir atvienots no elektrotīkla, bremžu pievads turpina saņemt strāvu un notiek brīvā kustība. Pārejot no liela ātruma uz mazu ātrumu, var iedarbināt elektrisko bremzēšanu. Lai atlaistu bremzi, vienkārši nospiediet pogu SB3.
Kad pēdējā aizsardzība tiek iedarbināta, atverot līnijas kontaktors uz aizsardzības paneļa elektromotors ir izslēgts un mehāniskās bremzes ir ieslēgtas. Mehānisms tiek kavēts ar maksimālu intensitāti.
Sakarā ar rezistoru izmantošanu ķēdē ātrgaitas tinumiem, laika releja KT vadībā tiek veikts salīdzinoši mīksts iedarbinājums, bet zemā ātruma tinuma bremzēšanas moments nav ierobežots, un šajā gadījumā mīksts. bremzēšanu var panākt ar vairākiem pogas SB1 vai SB2 impulsu slēdžiem.
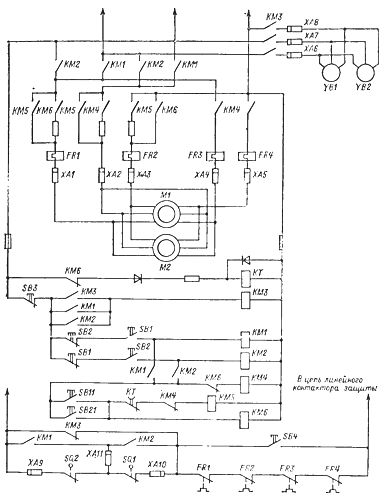
Rīsi. 3. Celtņa kustības mehānisma elektriskās piedziņas shēma (ar divu ātrumu vāveres korpusa motoru), ja to darbina no grīdas: M1.M2 - elektromotori, YB1, YB2 - bremžu piedziņas, KM1, KM 12 - kontaktori braukšanas virzienam, KMZ - bremžu kontaktors, KM4 - maza ātruma kontaktors, KM5 - ātrgaitas kontaktors, KM6 - rezistoru kontaktors statora ķēdē, FRI, FR2 , FR3 — termoreleji, KT — darbības kontroles laika relejs, SQ1, SQ2 — gala slēdži, SB1, SB2 — braukšanas virziena pogas (divvirzienu): SB11, SB21 — ātrgaitas pogas (otrās pogas pozīcija SB1, SB2), СВЗ — brīvās apturēšanas pogas atlaišana, SB4 — termiskās aizsardzības apiešanas poga, ХА1- ~ ХЛ11 — strāvas pārvades ratiņu kontakti.
attēlā. 4 ir parādīta ceļa celtņa kustības mehānisma diagramma, izmantojot divu ātrumu motoru bez brīvas iztukšošanas. Ķēde atšķiras no tās, kas tiek uzskatīta par secīgu zema ātruma un ātrgaitas tinumu iekļaušanu un noteiktu bremzēšanas momenta ierobežojumu, kad tinumi ir savienoti virknē. Shēma ir ieteicama gaisvadu celtņiem, kas darbojas ārpus telpām.
Celtņu pacelšanas mehānismu savienojuma shēmas
attēlā. 5. attēlā parādīta elektriskā pacēlāja piedziņas vadības ķēde, izmantojot divu ātrumu vāveres korpusa motoru ar diviem neatkarīgiem tinumiem ar polu skaita attiecību 4/24 un 6/16. Shēma ir veidota pēc divkāršas pārrāvuma principa no divām neatkarīgām elektromotora tinumu galvenās ķēdes un bremžu piedziņas ķēžu ierīcēm, kas nodrošina nepieciešamo pacēlāja piedziņas uzticamību.
Elektromotora zema ātruma tinums saņem strāvu caur līnijas kontaktora KM1 kontaktiem, virziena kontaktoru kontaktiem KM2, KMZ un kontaktora KM4 pārtraucošajiem kontaktiem pēc atbilstošās pogas SB1, SB2 nospiešanas (pirmā pozīcija).
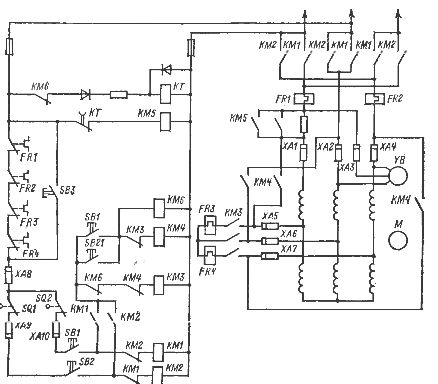
Rīsi. 4. Celtņa kustības mehānisma elektriskās piedziņas (ar divpakāpju vāveres motoru) shēma: M — elektromotors, YB — bremžu piedziņa, KM1, KM2 — kustības virziena kontaktori, KMZ — mazā ātruma kontaktors, KM4 — ātrgaitas kontaktors, KM5 — ātrgaitas rezistoru kontaktors, CT — starta laika kontroles relejs, FR4 — termiskie releji, SQ1, SQ2 — ierobežojuma slēdži, SB1, SB2 — braukšanas virziena pogas, SB11, SB21 — augstas Ātruma pogas, SB3 — apvada termiskā releja poga, XA1 -XA10 — strāvas pārvades kontakti
Nospiežot pogu SB11 (SB21), kontaktora KM4 spole saņem strāvu, tā pārslēdzas no maza ātruma uz lielu ātrumu ar minimālu strāvas pārtraukumu. Šajā gadījumā nevar būt pozīcija, kad ātrgaitas un zema ātruma spoles ir atspējotas. Pāreja no zema ātruma tinuma uz ātrgaitas tinumu tiek veikta laika releja KT vadībā. Kad tiek aktivizēta robežaizsardzība, motora tinumi un bremzes tiek aktivizētas divas reizes.
attēlā. 6 parādīta pacelšanas mehānisma elektriskās piedziņas diagramma ar diviem īssavienotiem elektromotoriem, kas savienoti viens ar otru un ar pārnesumkārbu caur planetāro pārnesumu ar pārnesumskaitli 6-8. Zema ātruma elektromotors M2 tiek ieslēgts visu mehānisma darbības laiku. Ātrgaitas motors tiek ieslēgts liela ātruma darbības laikā.Zema ātruma elektromotoram ir iebūvēta bremze.
Rīsi. 5. Pacelšanas mehānisma elektriskās piedziņas shēma (ar divpakāpju vāveres motoru), ja to darbina no grīdas: M — elektromotors, YB — bremžu spole, KM1 — lilijveida kontaktors, KM2 — KMZ — virziena kontaktori, KM4 — kontaktors pārslēgšanas ātrumam, FR1 — FR3 — termiskais relejs, CT — paātrinājuma kontroles relejs, SQ1, SQ2 — gala slēdži, SB1, SB2 — virziena pogas (divvirzienu). SB3 — termoreleju manevrēšanas poga, SB11, SB21 — ātrgaitas pogas (pogu SB1, SB2 otrā pozīcija), XA1 — XA10 — strāvas pārvades ratiņu kontakti.
Rīsi. 6. Pacelšanas mehānisma mikromotora shēma, ja to darbina no grīdas: M1 - ātrgaitas elektromotors, M2 - zema ātruma elektromotors, YB1 - ātrgaitas bremžu spole, YB2 - zema ātruma motora bremžu spole, KM1 - lineārais kontaktors, KM2 - KMZ - ātrgaitas kontaktoru apgriezieni, KM4, KM5 - maza ātruma kontaktori, KM6 - ātrgaitas bremžu kontaktors, KT - starta laika kontroles relejs, SQ1, SQ2 - gala slēdži, FR1 - FR4 - termoreleji, SB1, SB2 - divvirzienu virziena pogas, SB11, SB21 - ātrgaitas pogas (pogu SB1, SB2 otrā pozīcija), XA1— XA10 - strāvas pārvades ratiņu kontakti
Ātrgaitas elektromotoram ir atsevišķa bremze, ko darbina ar elektrohidrauliskais dzineklis… Kad tiek nospiesta virziena poga SB1 (SB2), kontaktora spole KM4 (KM5) tiek iedarbināta un tiek ieslēgts zema ātruma motors. Tajā pašā laikā tiek ieslēgts kopējās līnijas kontaktors KM1.
Kad poga SB1 (SB2) ir pilnībā nospiesta, kontakti SB11 (SB21) ir aizvērti, kontaktora KM2 (KMZ) un KM6 spole tiek iedarbināta, bet pēc tam, kad ir beidzies zemā ātruma palaišanas laiks Releja KT vadībā. , tiek ieslēgts ātrgaitas motors.
Palēninot pacelšanos vai nolaišanos pēc ātrgaitas motora izslēgšanas, bremzēšanu līdz mazam ātrumam veic YB1 bremze. Pēc gala slēdžu SQ1 un SQ2 iedarbināšanas elektriskā piedziņa tiek izslēgta ar divkāršu motora un bremžu piedziņas atvērtu ķēdi.
Visas aprakstītās shēmas, saskaņā ar nosacījumu par celtņa mehānismu aktivizēšanu, strādājot no grīdas, tikai ar pastāvīgu pogas nospiešanu Izslēdzot jebkura veida aizsardzību, mehānisms apstājas neatkarīgi no pogas vadības stāvokļa ierīci.
Aplūkotās shēmas attēlā. 2-5 var salikt no standarta magnētiskie starteri tipa PMA, PML un laika relejs. Izņēmums ir diagramma attēlā. 2, kurā apgriezienu pārslēgšanai tiek izmantots kontaktors līdzstrāvas kontaktors MK1-22, 40 A, 380 V, spole 220 V. Saskaņā ar norādītajām shēmām ir uzstādīti vadības paneļi motoriem ar jaudu no 0,8 līdz 2×8,5 kW un vadības paneļi pacelšanas motoriem ar jaudu no 10 līdz 22 kW. izstrādāta .