Laika diagrammas un mehānismu darbības blokshēmas sastādīšanas piemērs
Tehnoloģisko līniju vadības shēmās izejas elementu stāvoklis, t.i. izpildmehānismi (elektromagnētiskie releji, magnētiskie starteri, cietvielu releji utt.), nosaka ne tikai ievades vai uztveršanas elementu (pogu, sensoru utt.) kombinācija, bet arī to izmaiņu secība laika gaitā.
Izstrādātā tehnoloģiskā procesa verbālu aprakstu var uzrādīt ieejas un izejas signālu izmaiņu grafika veidā, ko sauc par tehnoloģiskā procesa laika diagrammu.

Laika diagrammas izveides piemērs tiks izveidots, pamatojoties uz graudu pirmstīrīšanas līniju diagrammu.
Ķēdes darbības apraksts
Izmantojot slēdzi SA1, tiek izvēlēts darba režīms: automātiskais — galvenais darba režīms, manuālais — nodošanas ekspluatācijā režīms.
Nodošanas ekspluatācijā režīms sastāv no strāvas padeves caur bloķēšanas pogām SB4-SB6 lineāro mehānismu magnētisko starteru spolēm, apejot visu vadības loģiku. Šajā režīmā operators pats izlemj par līnijas garumu vai kādu atsevišķu mehānismu, tvertnes uzpildes kontrole tiek veikta tikai vizuāli.
Parasti šis darbības režīms tiek izmantots vai nu avārijas darbības režīmos, kad ir bojāta vadības loģika un ir nepieciešams pabeigt tehnoloģisko procesu, nezaudējot produktu līnijā, vai nodošanas ekspluatācijā, kad pēc kāda mehānisma remonta. uz līnijas ir jāiedarbina tikai tā, nevis visi lineārie mehānismi.
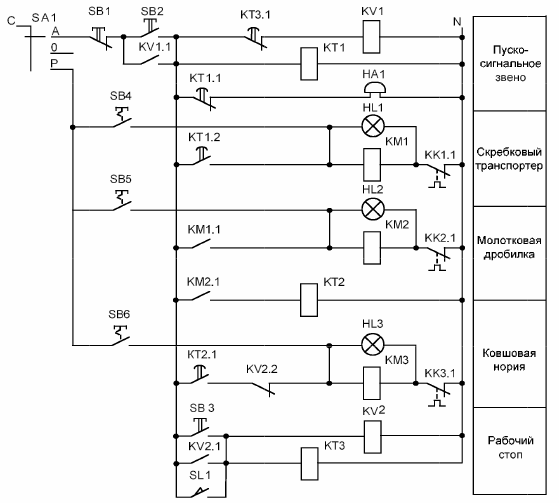
Rīsi. 1. Graudu priekšattīrīšanas līnijas releja-kontakta vadības ķēde
Pēc darbības režīma slēdža vadības ķēdē ir iekļauts palaišanas signalizācijas bloks, kas ļauj ar laika aizkavi vienlaikus izslēgt zvaniņu un ieslēgt skrāpju konveijeru. Veidojot releja kontaktu shēmas, mehānismu ieslēgšanas vai izslēgšanas secība tiek veikta, izmantojot magnētisko starteru aizvēršanas kontaktus.
Tātad mūsu gadījumā, ja uz magnētiskā startera KM1 (skrāpja konveijera) spoles ir enerģija, attiecīgi caur kontaktu KM1.1, jauda būs arī uz magnētiskā startera KM2 spoles (āmurs) .
Tajā pašā laikā ir nepraktiski iedarbināt visus līnijas mehānismus, jo darbības laikā šāds darbības režīms var rasties, ja abu līnijas mehānismu elektriskās piedziņas vēl nav sasniegušas savu nominālo darbības režīmu, un produkts ir piegādāts viņiem caur galvas mehānismu, kā rezultātā līnija avārijas apstāšanās. Tāpēc vadības ķēdē barošana tiek piegādāta galvas mehānisma magnētiskā startera KM3 spolei ar laika aizturi, ko realizē laika relejs KT2.
Lineārie mehānismi ir ieslēgti, darbs turpinās. Dažreiz darbības laikā pienāk brīdis, kad tvertne vēl nav pilna un līnija ir jāizslēdz. Šajā gadījumā vadības shēmā tiek izmantots bloks "darba apstāšanās", kas ļauj izslēgt visus līnijas mehānismus pareizā secībā (produkta kustības virzienā pa līniju).
Tātad, nospiežot pogu SB3, ieslēdzas starprelejs KV2, kura atvēršanas kontakts KV2.2 pārtrauc ķēdi ar spoli KM3, līnijas galvas mehānisms tiek izslēgts. Tajā pašā laikā laika relejs KT3 sagatavo atskaiti par līnijas darbības laiku mehānismu tīrīšanai no izstrādājuma.
Pēc noteikta laika laika releja KT3.1 kontakts pārtrauc ķēdi ar starpreleju KV1, kura kontakts apiet starta pogu. Tas izraisa visas vadības ķēdes apstāšanos un rezultātā lineāro mehānismu apstāšanos. Līdzīgs algoritms vadības ķēdes darbībai, iedarbinot līmeņa sensoru SL1 tvertnē.
Lineāro elektromotoru aizsardzība pret pārslodzi parādītajā vadības shēmā tiek veikta, izmantojot termisko releju KK1.1 ... KK3.1 pārtraucošos kontaktus, kas ir uzstādīti attiecīgi virknē ķēdēs ar magnētisko starteru spolēm KM1 .. KM3.
Lineāro mehānismu darbības vizuālai kontrolei vadības ķēdē ir indikatora lampas HL1 ... HL3. Normālā lineāro mehānismu darbībā iedegsies indikatora lampiņas. Avārijas izslēgšanas gadījumā strāvas padeve ķēdē ar magnētisko starteri pazūd un indikatora lampiņa attiecīgi nodziest.
Atbilstoši elektriskā galvenā automātiskā darbības režīma shēmai graudu priekštīrīšanas līnijai ir nepieciešamas 3 pogas: SB1 «Stop», SB2 «Start» un SB3 «Work stop», kā arī līmeņa sensors SL1. Tādējādi mums ir 4 ievades elementi. Tāpat pogas tiek pieņemtas ar pašatdevi, t.i. nefiksējot ieslēgšanas stāvokli.
Laika diagrammas veidošanas piemērs
4. izvades vienības: zvans HA1, skrāpis konveijers KM1, āmura drupinātājs KM2 un kausa lifts KM3.
Kad tiek nospiesta poga SB2 «Start», uz 10 sekundēm ir jāaktivizē pirmā sprūda saite (zvans HA1), lai brīdinātu personālu, ka procesa līnija drīzumā sāksies.
Pēc HA1 zvana noskanēšanas, ti. 10 sekundes pēc pogas "Start" nospiešanas SB2 86 tiek ieslēgts skrēperkonveijers KM1 un trieciensmalcinātājs KM2 (skat. 2. att.).
Mehānismu darba laiks tiek noteikts, pamatojoties uz to produktivitāti un ražošanas apjomu.Skrāpju konveijera, āmuru drupinātāja un kausa elevatora produktivitāte ir attiecīgi 5 t / h, 3 t / h un 2 t / h Nosaka graudu tilpumu pamatojoties uz tvertnes tilpumu un kilogramu graudu uz 1 m3.
Dažādu kultūru graudiem ir atšķirīga forma, blīvums un atbilstošs svars, tāpēc katra graudu veida kubikmetrs nevar svērt vienādi.
Ņemsim bunkura tilpumu 5 m.. Iekrautie graudi ir griķi, kas sver 560 - 660 kg. Sākotnējais atkritnes stāvoklis ir tukšs. Tad graudu daudzums pilnā traukā: N = 580 x 5 = 2900 kg.
Kausu liftam ir viszemākā produktivitāte no visiem mehānismiem; viņš arī piegādā līnijai graudus. Tā darba laiks būs: Tm3 = 2000/2900 = 0,689 h = 41 min.
Atlikušo mehānismu darba laiks būs vairāk nekā 41 minūte un tiek noteikts, pamatojoties uz ķēdes loģiku.
Pēc skrēperkonveijera KM1 un trieciena drupinātāja KM2 ieslēgšanas tiem jādod laiks paātrināties. Paātrinājuma laiks visiem mehānismiem tiek ņemts — 10 sekundes. Kausa pacēlājs KM3 tiek iedarbināts pēdējais (10 sekundes pēc KM1 un KM2 palaišanas), lai neradītu produkta aizsprostojumu uz āmura drupinātāja KM2 un skrēperkonveijera KM1. Pēc 41 minūtes viss tvertnes piepildīšanai nepieciešamais produkts tiks izvadīts cauri KM3 kausa liftam.
SL līmeņa sensors ir uzstādīts tā, lai tvertnes uzpildīšanas signāls tiktu uztverts pat pirms produkta atlikumu nokļūšanas caur āmuru drupinātāju KM2 un skrāpju konveijeru KM1.
Kad tiek iedarbināts SL1 līmeņa sensors, KM3 galvas mehānisms tiek izslēgts (pēc 41 minūtes un 20 sekundēm pēc SB2 «Start» pogas nospiešanas). Ar laika aizkavi KM1 un KM2 izslēdzas vienlaicīgi. Var pieņemt, ka šī laika aizkave ir 20 sekundes.
Laika diagramma normālai darbībai ir parādīta 2. attēlā.
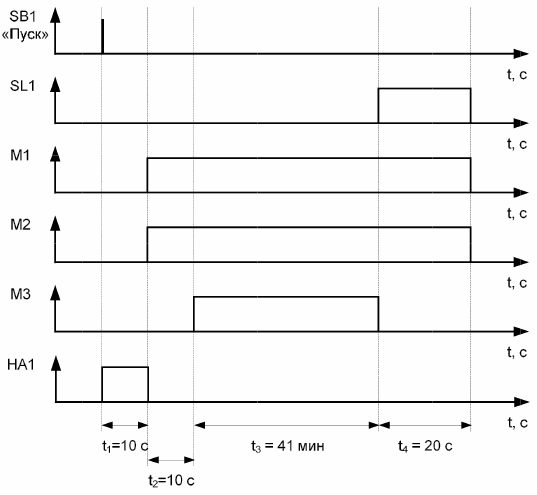
Rīsi. 2. Laika diagramma normālai darbībai
Režīmā «Operation stop» operators var apturēt procesu pirms līmeņa sensora SL1 iedarbināšanas, tāpēc šajā gadījumā nav iespējams noteikt mehānismu darbības laiku. Režīmā «General stop» visi mehānismi tiek nekavējoties deaktivizēti.
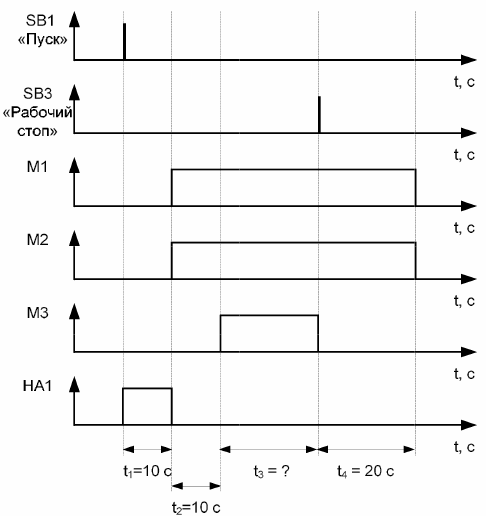
Rīsi. 3. Laika diagramma darbības režīmam «Darbības apstāšanās».
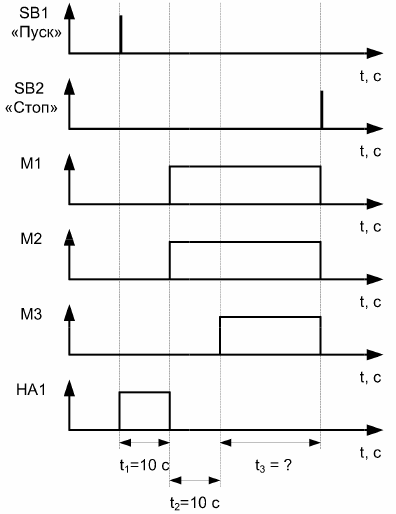
Rīsi. 4. Laika diagramma režīmam «Tālā apstāšanās».
Mehānismu darbības blokshēmas izveides piemērs
Tehnoloģiskā procesa blokshēmā skaidri jāparāda tā darba algoritms.Tam tiek izmantoti īpaši noteiktu darbību apzīmējumi.
5. attēlā parādīts graudu priekšattīrīšanas līnijas blokshēmas piemērs. Piedāvātā blokshēma parāda visas iespējamās tehnoloģiskā procesa funkcionēšanas iespējas. Situācija "Avārija" var notikt jebkurā laikā graudu priekštīrīšanas līnijas darbības laikā pēc pogas "Start" nospiešanas SB2.
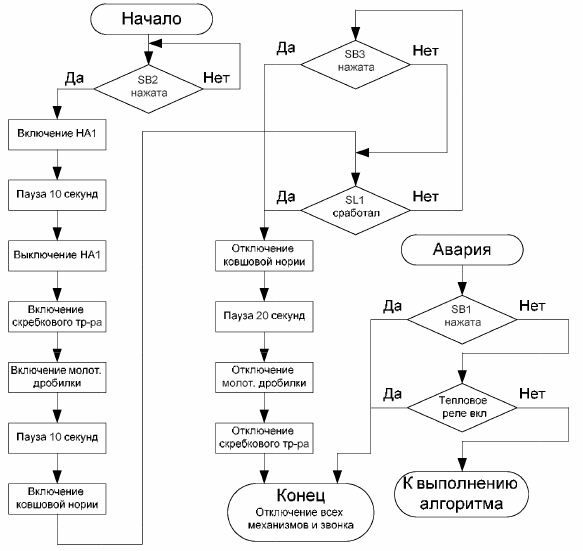
Rīsi. 5. Graudu priekšattīrīšanas līnijas blokshēma