Smalcinātāja savienojuma shēma
 Lopbarības graudu un rupjās lopbarības drupināšanai izmanto dažādu konstrukciju drupinātājus. DB tipa bezsieta sieta vadības darbības princips un shēmas ir parādīti 1. attēlā.
Lopbarības graudu un rupjās lopbarības drupināšanai izmanto dažādu konstrukciju drupinātājus. DB tipa bezsieta sieta vadības darbības princips un shēmas ir parādīti 1. attēlā.
Slīpēšanas graudi, izmantojot svārpstu 8 (1. att.), tiek ielādēti tvertnē 9, kuras līmenis tiek automātiski uzturēts, pamatojoties uz informāciju no diviem sensoriem. Graudu padeve malšanai tiek regulēta ar slāpētāju 10. Šajā gadījumā sasmalcināšanas produkts tiek transportēts ar gaisa plūsmu caur padeves līniju uz filtru 6.
Pietiekami sasmalcināti graudi, kas izgājuši caur sieta separatoru 4, ir gatavais produkts, kas tiek izvadīts no gliemežtransportiera 2. Pārējais tiek atgriezts atpakaļ smalcināšanas kamerā, un šī produkta daudzumu nosaka operators, izmantojot regulēšanas vārstu 5 ( galējā labajā pozīcijā viss materiāls tiek izvadīts bez frakcionēšanas). Viena daļa putekļainā gaisa tiek atgriezta smalcināšanas kamerā, bet otra daļa, kas iet caur filtru 6, tiek izvadīta atmosfērā.
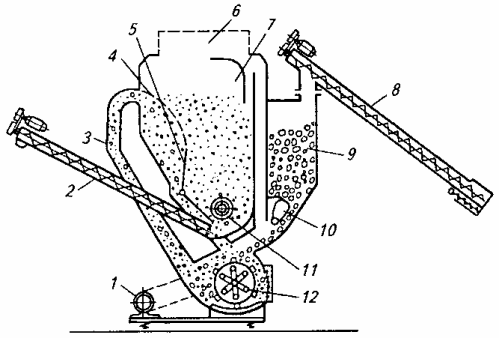
Rīsi. 1.Smalcinātāja DB-5 funkcionālā shēma: 1 — dzinējs, 2, 8 — svārki, 3 — gaisa vads, 4 — separators, 5, 10 — amortizatori, 6 — filtrs, 7 — kamera, 9 — graudu tvertne, 11 — maisītājs, 12 — rotors
Smalcinātāja vadības ķēde (2. att.) nodrošina secīgu izkraušanas gliemeža motoru (M1) un pēc tam drupinātāja (M2) iedarbināšanu, un, lai samazinātu palaišanas strāvu, drupinātāja motors tiek pievienots «zvaigznes» ķēdē, un pēc tam pārslēdzās uz "delta" ķēdi. Uzpildes gliemežnīca tiek iedarbināta, nospiežot pogu SB6 ar tukšu drupinātāja tvertni.
Glieme darbojas, līdz tiek aizvērti membrānas sensora SL1 kontakti tvertnē esošā graudu augšējā līmenī. Magnētiskais starteris KM4 un relejs KV tiek atslēgti, kad tos apiet ar kontaktu SL1. Arī pēc tvertnes iztukšošanas un augšējo līmeņu SL1 un apakšējā SL2 sensoru kontaktu atvēršanas svārpsts automātiski restartējas.
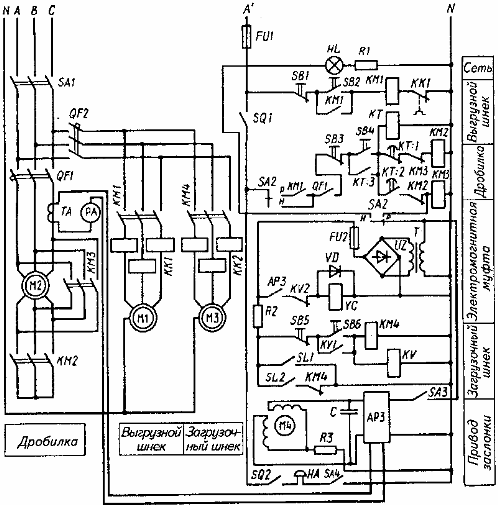
Rīsi. 2. Smalcinātāja elektriskā shēma
Smalcinātāja jauda tiek automātiski regulēta ar regulēšanas vārstu, ko pārvieto M4 izpildmehānisms automātiskā slodzes regulatora (ARZ) vadībā.
Būtiskas motora pārslodzes un strāvas padeves pārtraukuma gadījumā elektromagnētiskais sajūgs YC, kas savieno amortizatoru ar IM, tiek atvienots no kontakta ARZ, amortizators nokrīt zem sava svara un padeve graudus uz drupināšanas kameras pieturām.
Kad gala slēdzis SQ2 ir aizvērts, aizbīdņa pilnīgu atvēršanu, kas norāda uz drupinātāja slodzes samazināšanos, signalizē HA signāltaure.
Siena un salmu smalcināšanai izmanto smalcinātājus, nažus vai āmurus.Sasmalcināmā izejviela tiek ievadīta padeves piltuvē, kas, griežoties, izmet to zem drupināšanas kameras rotora āmuriem. Sasmalcinātā masa tiek izvadīta no kameras ar gaisa plūsmu, ko rada rotējošie āmuri.
Vadības ķēde nodrošina drupinātāja dzinēju un pēc tam (pēc 20 s) tvertnes secīgu iedarbināšanu. Šajā gadījumā drupinātājs tiek iedarbināts, pārslēdzot motoru no "zvaigznes" ķēdes uz "trīsstūra" ķēdi.
Smalcinātāja motora pārslodzes gadījumā elektromagnētiskais sajūgs uz īsu brīdi tiek atslēgts un padeve drupinātājam tiek pārtraukta. Pēc drupinātāja slodzes samazināšanas jauda tiek atjaunota. Ja motora pārslodze ilgst vairāk nekā 20 s, tvertnes piedziņas motors tiek izslēgts.