Elektriskās piedziņas vadības shēmas no vairākām vietām
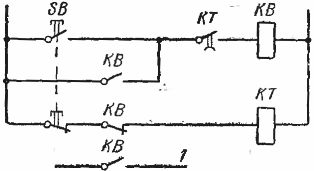
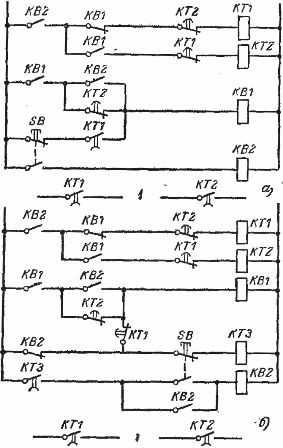
 Nepārtrauktu procesu līnijām, kur piedziņas darbojas galvenokārt vienā virzienā (uz priekšu) un reversas notiek reti, ieteicams izmantot ķēdi (1. att.) ar līnijas kontaktora iekļaušanu "uz priekšu" darbībai caur slēdzi, un "reversai" darbībai — caur KMR kontaktora iedarbināšanas kontaktiem. Šis izkārtojums samazina laiku, kas nepieciešams, lai sāktu braukšanu vēlamajā virzienā.
Nepārtrauktu procesu līnijām, kur piedziņas darbojas galvenokārt vienā virzienā (uz priekšu) un reversas notiek reti, ieteicams izmantot ķēdi (1. att.) ar līnijas kontaktora iekļaušanu "uz priekšu" darbībai caur slēdzi, un "reversai" darbībai — caur KMR kontaktora iedarbināšanas kontaktiem. Šis izkārtojums samazina laiku, kas nepieciešams, lai sāktu braukšanu vēlamajā virzienā.
Diagramma attēlā. 2 ļauj attālināti reversīvi vadīt elektromotoru no kustīga objekta. Šo shēmu izmanto, piemēram, lai vadītu apkures aku vāku motorus no celtņa. Signālu shēmas un dažādu signālu uztveršana ir parādīta attēlā. 3-9.
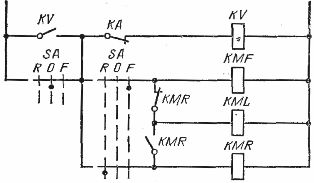
Rīsi. 1. Aizmugurējā dzinēja vadības shēma ar retu aizmugurējo «aizmuguri».
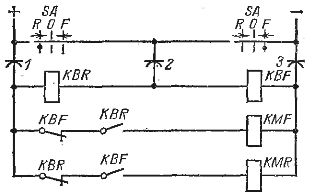
Rīsi. 2. Motora reversīvās vadības shēma ar vadības trolli.
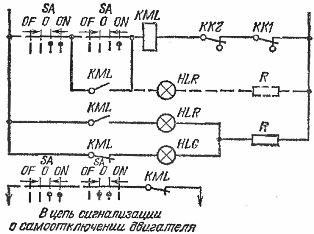
Rīsi. 3. Neatgriezeniskas elektriskās piedziņas statusa signalizācijas shēma.
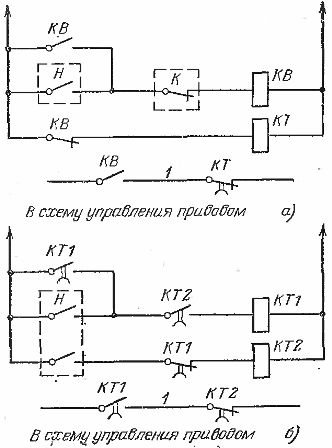
Rīsi. 4.Shēmas signāla uztveršanai ar laika aizkavi pēc ilga (a) un impulsa (b) signāla iedarbības sākuma: K — atbloķēšanas kontakts, 1 — piedziņas vadības ķēdes kontakti.
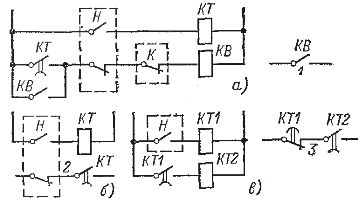
Rīsi. 5. Shēmas signāla saņemšanai pēc sitiena beigām (no astes) signālam H garš (a), impulss (b), impulss ar laika aizkavi (c). K — atbloķēšanas kontakts, 1, 2, 3 — piedziņas vadības ķēdes kontakti.
Rīsi. 6. Shēma garā signāla saņemšanai pēc sekundārā H sākuma.
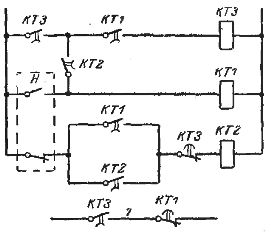
Rīsi. 7. Shēma impulsa signāla saņemšanai ar laika aizkavi pēc signāla H sekundārās darbības (KT1 ir 0,2-0,8 s; KT2 0,3 s; KTZ 0,5 s). 1 — piedziņas vadības ķēdes kontakti.
Rīsi. 8. Shēma noteikta ilguma signāla saņemšanai neatkarīgi no pogas nospiešanas ilguma: 1 — kontakts ar piedziņas vadības ķēdi.
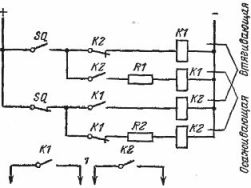
Skaitīšanas shēmas tiek izmantotas, lai automātiski ietekmētu piedziņu pēc noteikta darbību vai ciklu skaita skaitīšanas. Viņi var saskaitīt aizvērumus un atveres (10. att.), tikai aizvērumus (11. att.) vai tikai atveres (12. att.).
Skaitīšanas impulsi saskaņā ar norādītajām shēmām tiek piegādāti no fotoreleja kontaktiem, kustības slēdžiem vai citām ierīcēm.
Skaitīšanas shēmā, kas parādīta attēlā. 10, REV850 relejs tiek izmantots ar enkura magnētisko "pielipšanu", un tāpēc sprieguma padeves pārtraukums šai ķēdei netraucē skaitīšanu. Citās skaitīšanas ķēdēs, kad tiek pārtraukta sprieguma padeve, rodas impulsu skaitīšanas zudums.
Lai pārbaudītu konta shēmas derīgumu (11. att.), vadības pogas… Katru reizi, kad nospiežat pogu SB0N, ķēde veic vienu skaitīšanu. Poga SB0F tiek izmantota, lai atiestatītu skaitītāju.Šādas pogas var nodrošināt arī citās shēmās.
Rīsi. 9. Shēmas signālu uztveršanai divās dažādās shēmās, secīgi nospiežot vienu pogu: a — signāla ilgums ir vienāds ar pogas nospiešanas ilgumu, b — signāla ilgums nav atkarīgs no pogas nospiešanas ilguma. , 1 — piedziņas vadības ķēdes kontakti.
Rīsi. 10. Konta shēma līdz diviem.
Katra numura impulsi ir viens gala slēdža SQ kontakta aizvēršanās un viena atvēršana; 1 — piedziņas vadības ķēdes kontakti.
Impulsu skaitīšana shēmās att. 11, 12 ir SQ kontakta īslaicīgas aizvēršanas (atvēršanas), un šī kontakta slēgtajam stāvoklim vajadzētu būt pietiekamam, lai ieslēgtu impulsa kontaktoru KNA un vienu releju KB (KL).
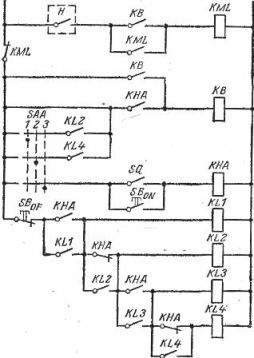
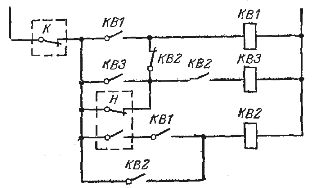
Rīsi. 11. Shēma skaitīšanai līdz trīs, kad kontakts SQ ir aizvērts.
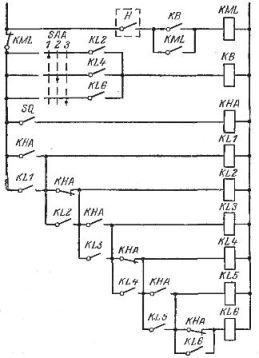
Rīsi. 12. Shēma skaitīšanai līdz trīs, atverot SQ kontaktu
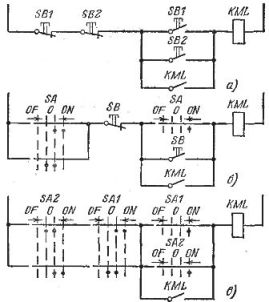
rīsi. 13. Motora neatgriezeniskas vadības shēmas no divām vietām: a — ar divām pogām, b — ar pogu un atslēgu, c — ar divām atslēgām.
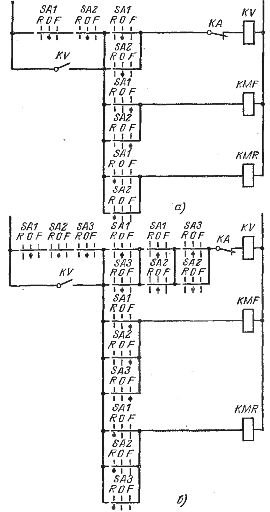
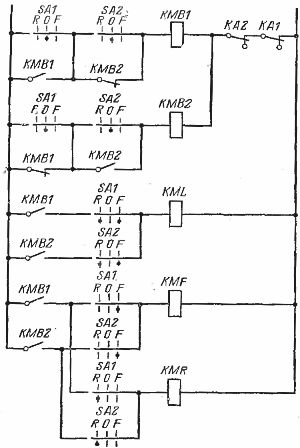
Rīsi. 14. Elektriskās piedziņas vienpusējās atkarīgās reversās vadības shēma no divām vietām.
Skaitīšanu atiestata KML līnijas kontaktors; SQ kontaktora slēgšanas laikam jābūt mazākam par KML kontaktora ieslēgšanās laiku.
Skaitīšanas shēmas nedaudz lielākam skaitam var sastādīt pēc analoģijas ar iepriekš minētajām shēmām, bet, ja skaits ir lielāks par pieci vai astoņi, vai gadījumos, kad skaitīšanas zudums, pazūdot spriegumam, nav pieļaujams, ieteicams izmantot numurētu releji.
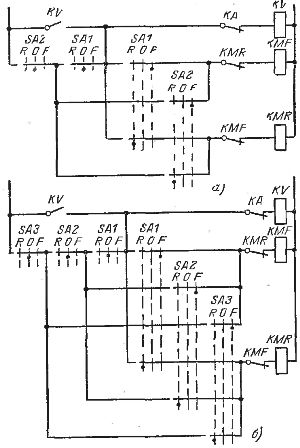
Rīsi. 15. Atkarīgā reversīvā dzinēja vadības shēmas: a — no divām vietām, b — no trim vietām
Var izmantot E-526 tipa motora soļu skaitīšanas releju līdz 30 skaitīšanai vai E 531 tipa impulsu skaitīšanas releju ar impulsu skaitīšanu līdz 75. Releji darbojas ar maiņstrāvu un to kontakti nodrošina strāvas izslēgšanu pie attiecīgi 220 V maiņstrāvas. un DC 50 un 30 vati.
Elektromotoru vadības ķēdes no vairākām vietām var būt atkarīgas, vienvirziena atkarīgas un neatkarīgas (13. att.). Visbiežāk kā vienkāršākās tiek izmantotas atkarīgās vadības shēmas (15. att.). Saskaņā ar šīm shēmām, darbinot jebkuru vadības ierīci, citas ierīces roktura pārvietošana no nulles uz darba stāvokli izraisa motora apstāšanos.
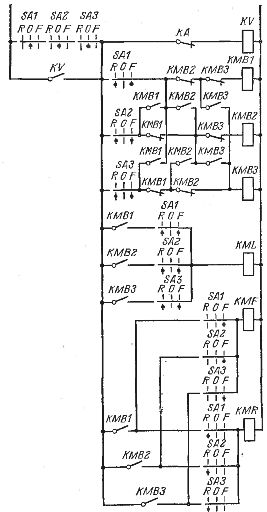
Saskaņā ar vienvirziena atkarīgās vadības shēmām no divām (14. att.) un trim (16. att.) vietām slēdzi SA1 var vadīt neatkarīgi no slēdža SA2 (SA2 un SA3) stāvokļa. SA2 slēdža vadība ir iespējama, kad SA1 slēdzis atrodas nulles pozīcijā un nav atkarīgs no SA3 slēdža stāvokļa. SA3 slēdžu vadība ir iespējama, kad slēdži SA1 un SA2 atrodas nulles pozīcijā.
16. attēls. Trīs vietu virzuļdzinēja vienvirziena atkarīgās vadības shēma
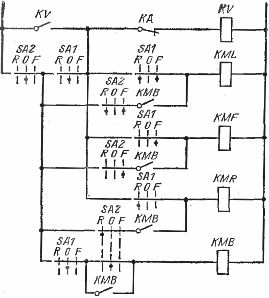
Rīsi. 17. Dzinēja neatkarīgas reversās vadības shēma no divām vietām.
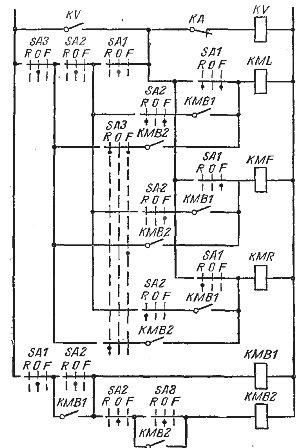
Rīsi. 18. Dzinēja neatkarīgas reversās vadības shēma no trim vietām.
Neatkarīgās vadības shēmās (17. un 18. att.), kad piedziņu vada jebkurš pirmais slēdzis (SA1, SA2 vai SA3), otra slēdža roktura pārvietošana neietekmē piedziņas darbību. Pēc atgriešanās pirmās atslēgas roktura nulles pozīcijā izpildmehānisms apstāsies neatkarīgi no otrās atslēgas (vai divu citu) roktura stāvokļa. Jauns starts ir iespējams tikai pēc otrās atslēgas (vai divu citu) atgriešanas nulles pozīcijā.
Ļoti bieži viņi izmanto piedziņas vadību no divām un trim vietām pēc vienkāršotas shēmas (19. att.); tas nozīmē preferenciālu kontroli tikai no vienas pirmās vietas (atslēga SA1). Ja piedziņu vada cits slēdzis (SA2 vai SA3), pirmā slēdža roktura pārvietošana no nulles stāvokļa izraisa vadības pārnešanu uz šo slēdzi.
Rīsi. 19. Vienkāršotas shēmas reversīvās elektriskās piedziņas vadīšanai: a — no divām vietām, b — no trim vietām.