CNC urbjmašīnu elektroiekārtas
 CNC urbjmašīnu elektriskās iekārtas tiks aplūkotas, piemēram, mašīnas modeļa 2R135F2 piemērā.
CNC urbjmašīnu elektriskās iekārtas tiks aplūkotas, piemēram, mašīnas modeļa 2R135F2 piemērā.
CNC urbjmašīnas modelis 2R135F2 ir paredzētas virsbūves daļu apstrādei, kā arī tādu detaļu kā «atloks», «pārklājums», «plāksne», «kronšteins» un citas. Iekārtas ļauj veikt urbšanu, urbšanu, iegremdēšanu, vītņošanu un citas darbības.
Iekārtas vispārējais skats ir parādīts attēlā.
Apstrādājamā detaļa ir piestiprināta pie galda. Tornī var ievietot sešus instrumentus. Norādot apstrādi, tabula pārvietojas pa X, Y asīm uz programmas norādīto pozīciju. Pēc tabulas uzstādīšanas tiek aktivizēts atbalsts.
Slīdņa kustība apstrādes laikā notiek uz leju pa Z asi saskaņā ar programmu. Slīdnis atgriežas sākotnējā augšējā pozīcijā, līdz tiek aktivizēts gala slēdzis. Instrumenta maiņa tiek veikta, pagriežot tornīti augšējā slīdņa pozīcijā.
Telpiskās kustības pa galda asīm un bīdāmām asīm kontrolē pozīcijas sensori, no kuriem nepārtraukta informācija tiek pārraidīta uz CNC bloku. Tornī ir seši gala slēdži, kas nosaka viena instrumenta darba stāvokli.
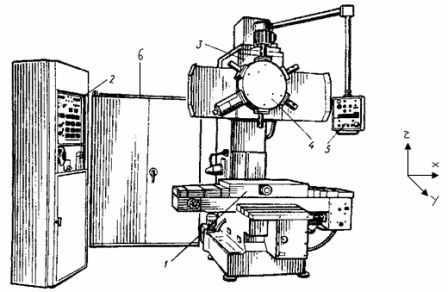
att. 1. Iekārtas kopskats: 1 — galds, 2 — CNC ierīce, 3 — balsts, 4 — tornis, 5 — vadības panelis, 6 — skapis releju automatizācijai.
Iekārtas elektroiekārtas sastāv no releja automatizācijas skapja, ciparu vadības ierīces (CNC) un mašīnām un ierīcēm, kas uzstādītas tieši uz mašīnas konstrukcijas.
Elektrības skapī ietilpst:
1 — releju panelis, uz kura ir uzstādīti starpreleji un releji saziņai ar CPU bloku,
2 — barošanas panelis, uz kura uzstādīts vadāms tiristoru pārveidotājs, transformatori, magnētiskie starteri, aizsargierīces, barošanas avotu taisngrieži,
3 — ieejas slēdzis mašīnas pieslēgšanai elektrotīklam.
Mašīna ir aprīkota ar:
1 — elektromotori,
2 — ETM tipa elektromagnētiskie sajūgi mašīnas darba korpusu kustības ātruma regulēšanai,
3 — atgriezeniskās saites sensori mašīnas darba orgānu stāvokļa uzraudzībai,
4 — gala slēdži, kas ierobežo mašīnas darba korpusu kustības diapazonu,
5 — vadības panelis ar pogām un indikatoriem,
6 - lampa apstrādes darba zonas apgaismošanai.
Karietes piedziņu vada tiristoru pārveidotājs, kas nodrošina līdzstrāvas motora regulētu darbību ieprogrammētā padeves režīmā. Elektromagnētiskie sajūgi nodrošina ātru un lēnu suporta kustību pozicionēšanas un apstāšanās laikā.
Galvenās kustības (vārpstas) piedziņa satur neregulētu asinhrono elektromotoru un automātisko pārnesumkārbu ar elektromagnētiskajiem sajūgiem, kas nodrošina 19 vārpstas apgriezienus.
Galda kustība tiek veikta pa divām koordinātu asīm ar asinhrono elektromotoru palīdzību. Galda kustības ātrumu regulē X un Y ass sajūgi.Sajūgi nodrošina ātru, lēnu kustību un galda piedziņas apturēšanu.
Torni darbina elektromotors. Galvas pievilkšana un saspiešana tiek veikta, izmantojot sajūgu.
CNC urbjmašīnas piedziņu elektromotoru tehniskie parametri ir parādīti 1. tabulā.

Iekārtas darba orgānu programmētās vadības vispārējā blokshēma ir parādīta attēlā. 2.
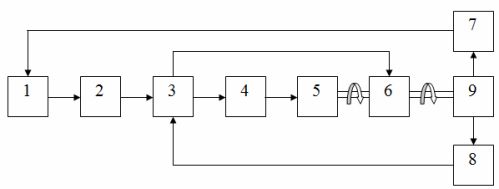
Rīsi. 2. Blokshēma mašīnas darba orgānu vadīšanai: 1 — CNC, 2 — koda releju bloks, 3 — starpreleju bloks, 4 — magnētisko starteru bloks, 5 — elektromotori, 6 — elektromagnētisko sajūgu bloks, 7 — mašīnas darba korpusu novietojuma sensori, 8 — ceļa pārmijas, 9 — mašīnas darba korpusi.
Ratiņu vadības ķēdē ir papildus vadāms pārveidotājs, kas nodrošina iespēju vienmērīgi regulēt motora griešanās ātrumu.
Jebkura objekta iekļaušanu mašīnā var veikt no iekārtas vadības paneļa vai no CNC ierīces.
CNC vadības komandas tiek atšifrētas ar koda relejiem releja blokā. Ieslēgtie releji ģenerē signālus, kas tiek ievadīti starprelejiem.Šajos relejos ietilpst elektromagnētiskie sajūgi vai magnētiskie starteri, kas kontrolē elektromotoru darbību.
Galda un priekšmetstikliņa pozicionēšana tiek veikta pie fiksētām kustības ātruma vērtībām. TNC salīdzina attālumu no sagataves faktiskās pozīcijas ar to, kas ieprogrammēts ar iestatījumiem. Ja šis attālums ir vienāds ar iestatīto vērtību, kustības ātrums tiek mainīts. Piedziņa tiek apturēta programmas punktā.
Detaļa tiek apstrādāta ar programmējamiem priekšmetstikliņa padeves ātrumiem.
Ieslēdziet mašīnas elektrisko aprīkojumu
Mašīnas elektriskās iekārtas ir savienotas ar elektrotīklu, izmantojot ieejas ķēdes pārtraucēju. Sprieguma padevi visām mašīnas piedziņas ķēdēm nodrošina kontaktors, kad tiek nospiesta poga «Start». Izslēgšanu veic, izmantojot pogu «Apturēt». Vārpstas, galda un torņa motorus darbina automātiskie slēdži. Lai sāktu, jums jāieslēdz automātiskie slēdži un jānospiež poga «Start».
Suportu vadība
Elektriskā piedziņa nodrošina slīdņa kustību pa Z asi mašīnas koordinātu sistēmā. Elektriskā suporta piedziņa darbojas pozicionēšanas un apstrādes režīmos. Pozicionēšanas režīms uz leju ietver ātru pārvietošanos līdz iestatītajā punktā norādītajam attālumam, kam seko lēna pārvietošanās līdz sagataves virsmai, ar nosacījumu, ka ātrums tiek samazināts divos posmos.
Programmējamā ātruma padeve tiek veikta apstrādes laikā (piem., urbšanas) virzienā uz leju. Palēnināta kustība notiek, kad instruments tiek vilkts no sagataves uz virsmu virzienā uz augšu.Instrumenta ievilkšana "uz augšu" no sagataves sākuma stāvoklī tiek veikta ātrās kustības režīmā.
Kustības ātruma regulēšana tiek veikta ar divu elektromagnētisko savienojumu palīdzību (attiecīgi ātras un lēnas kustības) un mainot motora griešanās ātrumu, mainot iestatītās vērtības pretestību vadāmā pārveidotāja ieejā. Regulators ir potenciometrs, kas sastāv no virknē savienotu rezistoru komplekta.
Pozicionēšanas režīmā tiek fiksēts ātras un lēnas kustības ātrums. Padeves režīmā ātrums tiek regulēts atbilstoši ieprogrammētajai koda vērtībai, kas nāk no CNC. Vadības signāli no CNC bloka tiek padoti uz uztveršanas relejiem, kas ar saviem kontaktiem pārslēdz dažādas ķēdes piedziņas vadības ķēdē.
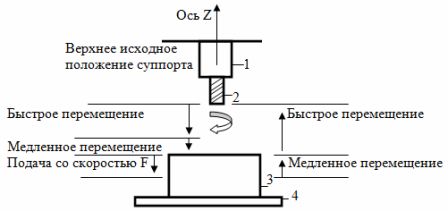
Rīsi. 3. Atbalsta kustības diagramma, apstrādājot daļu: 1 — balsts, 2 — instruments, 3 — daļa, 4 — galds.
Pamata kustību kontrole
Vārpstas piedziņa satur asinhrono reverso elektromotoru, automātisko pārnesumkārbu (AKS) ar elektromagnētiskajiem sajūgiem. Galvenais kustības motors visās apstrādes darbībās, izņemot vītņošanu, darbojas nepārtraukti, ar pareizo griešanās virzienu (pulksteņrādītāja virzienā).
Kad motors ir apgriezts vītņošanas režīmā, laiku nodrošina laika relejs, kas ļauj mainīt griešanās virzienu. Kamēr ir ieslēgts laika relejs, jaunu virzienu iestatīt nav iespējams.
Rotācija no motora uz vārpstu tiek pārraidīta caur AKC zobratiem, ko kontrolē elektromagnētiskie sajūgi. Sajūgi nodrošina noteiktā rotācijas ātruma regulēšanu.Binārais — decimālā ātruma kods tiek ievadīts relejam. Šo releju kontakti veido vārpstas ātruma koda dekodētāju un ieslēdz elektromagnētiskos sajūgus.
Galda piedziņas vadība
Tabula pārvietojas pa mašīnas koordinātu sistēmas X, Y asīm. Kustību nodrošina divi reversīvi asinhronie motori. Galda ātruma kontrole ir divpakāpju. Ātra un lēna kustība galda pozicionēšanas laikā tiek veikta, izmantojot elektromagnētiskos sajūgus, kas ietver pārnesumus uz reduktora.
No CNC moduļa tiek saņemti virziena signāli: "pa labi" uz X ass, "uz priekšu" uz Y ass un "ātri" vai "lēni" ātruma signāli. Uztvērējreleji tiek ieslēgti pēc CNC bloka signāliem, kas savukārt ieslēdz atbilstošos kustību savienotājus un kontaktorus. Kontaktori nodrošina motoru pieslēgšanu strāvas ķēdēm. Kad kontaktori ir izslēgti, tiek aktivizēti bremžu sajūgi, fiksējot galda stāvokli norādītajā pozīcijā. Tabulas kustību pa koordinātām ierobežo gala slēdži.
Releja kontakti tiek ievadīti kontaktora spoļu ķēdē, nodrošinot laika aizkavi, lai iestatītu apgriezto griešanās virzienu, kad motors ir apgriezts. Kamēr šie releji ir ieslēgti, nevar iestatīt jaunu griešanās virzienu.
Torņa vadība
Torņa piedziņa nodrošina instrumentu maiņu, pagriežot tornīti. Piedziņa satur asinhronu divu ātrumu elektromotoru un elektromagnētisko sajūgu. Atslēgtais sajūgs ieslēdz tornīti darba stāvoklī. Galvas stāvokļa maiņa notiek pēc tās atbrīvošanas.
Galvas pievilkšanas un atslābināšanas procesu veic zema ātruma elektromotors, kad statora tinumi ir savienoti pēc «delta» shēmas. Šajā gadījumā sajūgam jābūt ieslēgtam. Galvas griešanos veic motors ar lielu ātrumu (dubultzvaigžņu shēma), arī ar ieslēgtu sajūgu.
Kontaktori un sajūgs ieslēdzas, kad tiek saņemts instrumenta kods. Ja kods neatbilst galvas stāvoklim, sākas instrumenta maiņas process.