Elektriskās iekārtas kokzāģētavām
 Kokzāģētavās galvenā iekārta apaļo zāģmateriālu sagriešanai dēļos, baļķos un citos sortimentos ir kokzāģētavu galvenā iekārta.
Kokzāģētavās galvenā iekārta apaļo zāģmateriālu sagriešanai dēļos, baļķos un citos sortimentos ir kokzāģētavu galvenā iekārta.
Zāģa rāmis ir vairāku zāģu mašīna ar zāģiem, kas izstiepti stingrā rāmī. Vertikālās kokzāģētavas tiek ražotas ar vienstāvu un divstāvu, šaurām un platām atverēm, ar skriešanu un nepārtrauktu padevi. Jaunākajiem kokzāģētavu rāmjiem ir trīs līdz seši elektromotori. Kloķvārpstas griešanās ātrums - no 200 līdz 600 min-1, piedziņu veic asinhronais motors ar uztītu rotoru un dažreiz ar vāveres rotora motoru.
Uz zāģa rāmja (1. att.) pieres griezumā tiek sagriezti baļķi 3,2–9 m garumā un 65 cm diametrā. Rāmja čuguna rāmis sastāv no divām kājām un sānu sienām, kas savienotas viena ar otru ar šķērseniskiem savienojumiem.
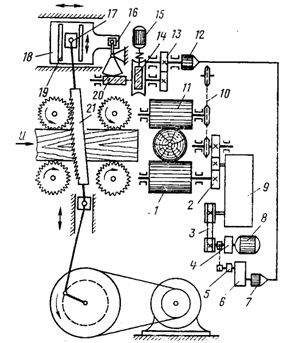
Rīsi. 1. Kokzāģētavas rāmja kinemātiskā diagramma
Kokzāģētavas rāmis ir uzstādīts uz pamatplāksnes. Kloķvārpsta ar diviem spararatiem un piedziņas skriemeli griežas divos galvenajos gultņos, kas uzstādīti uz plāksnes.I veida sijas savienojošais stienis ir savienots ar apakšējo galvu ar kloķvārpstas tapu caur rullīšu gultni, un augšējā galva ir savienota ar tapu caur zāģa rāmja apakšējo šķērsstieni caur adatas gultni.
Zāģa rāmja apakšējās un augšējās šķērssijas ir savienotas ar apaļiem cauruļveida balstiem. Tekstolīta slīdņi ar tapām uz zāģa rāmja šķērselementiem ir savienoti ar konusveida rullīšu gultņiem.
Zāģa rāmja konstrukcija ļauj izmantot hidraulisko spriegotāju. No astoņām vadotnēm četras ir prizmatiskas un četras plakanas, kas pa pāriem ir piestiprinātas pie čuguna plāksnēm, kas uzstādītas uz gultas. Augšējās virzošās plāksnes ir uzstādītas uz slaida un tiek pārvietotas ar zāģa rāmja noliekšanas mehānismu atkarībā no zemes gabala lieluma Δ.
Četru rullīšu padeves mehānisma individuālā piedziņa, kas sastāv no tiristoru piedziņas, nodrošina vienmērīgu baļķa padeves ātruma regulēšanu. Griezes moments tiek pārsūtīts uz apakšējiem veltņiem 1 no dzinēja 8 caur elektromagnētu, elektromagnētisko sajūgu 4, siksnas transmisiju 3, pārnesumkārbu 9 un zobratus 2. Augšējie veltņi 11 griežas caur rullīšu ķēdi 10.
Paku izmēru regulē, mainot elektromagnētiskā sajūga 4 slīdni, ko veic, pagriežot centrbēdzes regulatora 5 ripu. Šim nolūkam operators ieslēdz servomotoru 15, pagriežot skalu atbilstošā leņķī, rotāciju veic tārpa zobrats 14, zobrati 13, selsyn sensors 12, selsyn uztvērējs 7 un reduktors 6.Vienlaicīgi mainot telpu Δ caur gliemežpārvadu 20 un sviru 16, plāksne 18 pārvietojas horizontālā plaknē ar zāģa rāmja augšējā aizbīdņa 17 vadotnēm 19 un mainās zāģa 21 slīpums.
Zāģētavas rāmja 2P80 shematiskā shēma ir parādīta attēlā. 2. Tā elektroiekārta sastāv no 125 kW galvenās vārpstas piedziņas asinhronā motora M1, zāģa rāmja noliekšanas mehānisma piedziņas M2 motora, hidrauliskās stacijas motora MZ, eļļošanas sūkņa motora M4 un automātiskās vadības sistēmas, kuras pamatā ir tiristoru piedziņa ar līdzstrāvas motoru M5.
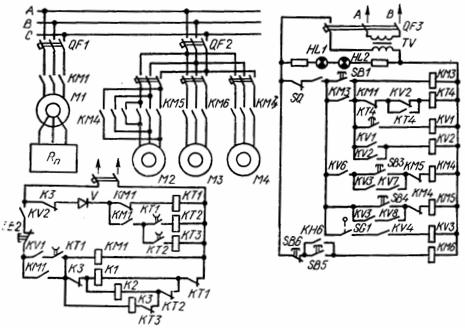
Rīsi. 2. Kokzāģētavas rāmja 2P80 elektriskā shematiskā shēma
Motoru maksimālo strāvas aizsardzību nodrošina automātiskie slēdži: QF1 — motors M1, QF2 — motori M2, MZ, M4 un QF3 — vadības ķēdes.Ieslēgts QF3 iedegas brīdinājuma lampiņas HL1 un HL2. Galvenās vārpstas motors M1 tiek iedarbināts, izmantojot lineāro kontaktoru KM1, un barošanas motora M5 piedziņas motors tiek iedarbināts, izmantojot kontaktoru KM2.
Elektriskās vadības ķēdē ietilpst: jaudas ķēdes (piedziņas motori); releju-kontaktoru vadības ķēdes un automātiskās vadības sistēmas shēmas, kuru pamatā ir tiristoru līdzstrāvas piedziņa. Lai ieslēgtu zāģa rāmja piedziņas iedarbināšanu, kad augšējie vārti ir atvērti, tiek noņemta galvenā vārpsta un ķīļsiksnas drošības sloksnes, bet, kad zāģa rāmis ir apturēts, tiek izmantoti gala slēdži (kuru bloks ir norādīts 2. att. ar burtiem SQ).
Motora M1 iedarbināšana ar uztītu rotoru tiek veikta kā laika funkcija, secīgi aizverot paātrinājuma relejus KT1, KT2 un KT3, kas ar noteiktu laika aizkavi pakāpeniski izdod trīs palaišanas reostata Rp posmus, izmantojot kontaktorus K1, K2. un K3.
Nospiežot starta pogu SB1 (skat. 2. att.), tiek ieslēgta kontaktora KM3 spole, kas aizver eļļas sūkņa motora M4 jaudas kontaktus KM3, aizvēršanas kontakts KM3 apiet pogu SB1.
Galvenais kustības motors M1 tiek iedarbināts, kad starpreleja KV1 kontakts KV1 ir aizvērts. Šī releja spole saņem strāvu caur KT4 laika releja KT4 kontaktu, kas, aizvērts, aizveras ar kavēšanos. Tāpēc relejs KT4 nodrošina aizkavi starp motora M4 iedarbināšanu un M1.
Kad relejs KV1 ir ieslēgts, vienlaikus ieslēdzas relejs KV2, kura aizvēršanas kontakts KV2 iedarbina kontaktora KM1 spoli. Spole KM1 pēc strāvas saņemšanas ieslēdz motora M1 strāvas ķēdes galvenos kontaktus KM1, un motora rotors sāks griezties, kad palaišanas reostats ir pilnībā iestatīts. Pēc tam, kad paātrinājuma kontaktori K1, K2 un K3 darbojas ar palēninājumu, motora rotors griezīsies ar maksimālo ātrumu.
Kad motora M1 iedarbināšana ir pabeigta, atvēršanas kontakts K3 vienlaikus pārtrauks kontaktoru K1 un K2 barošanas ķēdi, un kontakts K3 padevēja M5 motora startera ķēdē aizvērsies un sagatavos to palaišanai. Motors tiek apturēts, nospiežot pogu SB2.
Hidrauliskā sistēma nodrošina priekšējo un aizmugurējo durvju pacelšanu un nolaišanu, uz kuru metinātajiem korpusiem ir uzstādīti augšējie padeves rullīši.Vārtus augšējā stāvoklī paceļ hidrauliskie cilindri, kurus darbina hidrauliskā stacija. Hidrauliskās stacijas piedziņu nodrošina motors M3, kas tiek iedarbināts, nospiežot pogu, savukārt startera spole KM6 tiek pieslēgta, kas aizver KM6 galvenos kontaktus.
Zāģa rāmja slīpumu var kontrolēt manuāli (nospiežot pogas SB3 un SB4) vai automātiski. Automātiski kontrolējot startera KM4 tinumu KM4 ("vairāk") un startera KM5 ("mazāk") KM5, tie saņem strāvu caur releju KV3, kas ieslēdzas, kad režīma slēdzis atrodas pozīcijā "Automātisks". , tas ir, kad kontakts SQ1 ir aizvērts.
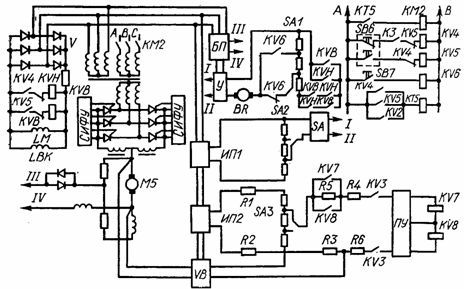
Tiristoru barošanas bloks sastāv no M5 līdzstrāvas motora un tiristora pārveidotāja. Tiristoru pārveidotāju (9.2. att., c) ieslēdz starteris KM2, caur kontaktu KV3, kura spole saņem strāvu, kad ir aizvērts tā ķēdē esošā laika releja KT5 kontakts. Laika relejs KT5 tiks aktivizēts, kad tiek aktivizēta spole KV4 (kustība uz priekšu) vai KV5 (kustība atpakaļgaitā).
Ja baļķis griešanas laikā iestrēgst, tas tiek ievilkts, virzot dzinēju atpakaļgaitā. Padeves motora iedarbināšana nav iespējama, ja nedarbojas M1 motors. To nodrošina kontakta K3 iekļaušana barošanas ķēdē KV4, kas aizveras pēc motora M1 iedarbināšanas beigām. Kad starteris KM2 ir ieslēgts, pārveidotājs un motora lauka tinumi LM tiek iedarbināti.
Ja reģistrs ir iestrēdzis, nospiežot pogu SB6, tiek izslēgti releji KV4 un KVB un ieslēdzas releji KV5 un KVH.Šajā gadījumā KVH relejs aizver savus kontaktus pastiprinātāja U barošanas ķēdē, kas ir iekļauts tiristora pārveidotājā, kā rezultātā mainās sprieguma polaritāte pie pārveidotāja izejas un motors maina virzienu. rotācija.

Rotācijas ātruma stabilitāti, mainoties slodzei, nodrošina negatīva atgriezeniskā saite, ko realizē BR tahoģenerators ar LBL ierosmes spoli. Armatūra BR ir savienota ar pastiprinātāja V ieeju. Pārejas slodze tiek piespiesta, izmantojot reģeneratīvo bremzēšanu tiristora pārveidotāja ķēdē.
Padeves ātrums tiek regulēts manuāli un automātiski. Šim nolūkam ir iestatīts SA slēdzis. Manuālā padeves ātruma regulēšanā ātruma regulators ir savienots ar pastiprinātāju U caur ķēdēm I un II. Ātruma regulatori SA1 - SA3 ir slēdži uz paneļiem, kuriem ir pievienoti MLT rezistori.
Kustīgā kontakta SA1 pārvietošana maina vadības signālu, kas caur PU pastiprinātāju nonāk impulsa fāzes vadības sistēmā (SPPC), kas maina ar tilta taisngrieža ķēdi savienoto tiristoru degšanas leņķi, kā rezultātā mainās motora M5 ātrums.
Lai automātiski regulētu M5 dzinēja apgriezienu skaitu, izmantojot slēdzi SA, SA1 tiek atvienots no pastiprinātāja bloka Y un savienots ar pastiprinātāju Y SA2 - kakta diametra sensoru. Šajā gadījumā SA1 sāk saņemt strāvu no SA2, kas ir potenciometrs, kas pievienots stabilizējošajam barošanas blokam IP1 un ko rotē jaudas pārslēgšanas mehānisms.
Mainoties kakta diametram, pārvietojas potenciometra SA2 slīdnis un mainās uz SA1 pieliktā vadības sprieguma vērtība, līdz ar to, mainoties žurnāla diametram, mainās padeve. Ātruma vērtībai jāatbilst zāģa rāmja slīpumam, ātrumu kontrolē, pārslēdzot SA3.
Zāģa rāmja slīpuma sensors SA3 ir savienots ar stabilizētu barošanas bloku IP2 caur rezistoriem R1 un R2. Rezultāts ir spriegums, kas ir proporcionāls zāģa rāmja slīpuma leņķim. Šo spriegumu salīdzina ar motora spriegumu M5, proporcionālu ātrumam, kas ņemts no motora armatūras un caur taisngrieža bloku VB tiek padots uz rezistoru R3, tas tiek atņemts no zāģa rāmja slīpuma sensora izejas sprieguma.
Kad motors darbojas atpakaļgaitā, VB bloks uztur nemainīgu atsauces polaritāti. Nesakritības signāls tiek padots uz starppastiprinātāja PU ieeju caur rezistoriem R4 — R6 un aizvēršanas kontaktiem KV3 (aizvērts automātiskās regulēšanas laikā). Signāls tiek pastiprināts un tiek padots uz PU izeju, kurai ir pievienoti releji KV7 un KV8. Tie tiek iedarbināti atkarībā no kļūdas ievades signāla polaritātes.
Tātad, palielinoties padeves ātrumam, no motora noņemtais spriegums palielinās, un neatbilstības vērtība ir negatīva. Šajā gadījumā tiek izjaukta saikne starp padeves ātrumu un zāģa rāmja slīpumu. Pastiprinātais izejas signāls no PU pastiprinātāja ietver releju KV7, kura aizvēršanas kontaktos ietilpst spole KM4.
KM4 aizvēršanas kontakti pagriež M2 motoru "uz priekšu", palielinot zāģa rāmja slīpumu.Tajā pašā laikā izejas spriegums pie SA3 tiek palielināts, pārvietojot potenciometra slīdni. Novirzes signāls sāk samazināties līdz nullei, pēc kura zāģa rāmja slīpuma palielināšanās apstājas. Tas saglabā atbilstību starp padeves ātrumu un zāģa rāmja leņķi.
Kontroles process notiek līdzīgi ar padeves ātruma samazināšanos, bet kļūdas signālam šajā gadījumā ir pozitīva zīme. Tas izraisa releja KV8 ieslēgšanos, kā arī KM5 un motora M2 atgriešanos. Samazinoties padeves ātrumam, samazinās arī zāģa rāmja slīpums. Regulēšanas laikā piedziņas kontakti KV7 un KV8 apiet pretestību R5, kas ļauj piespiest procesu.
Griešanas sākumā griešanas ātrumam jābūt vienādam ar ne vairāk kā 30% no darba padeves ātruma. Tas tiek darīts šādā veidā. Nospiežot pogu SB7, tiek iedarbināts relejs KV6, kura kontakti tiek pārslēgti uz izeju SA1, lai caur noslēdzošo kontaktu KV6 tiktu piegādāts neliels vadības spriegums uz tiristora pārveidotāja ieeju, kas rada zemu griešanas ātrumu. .
Pēc padeves beigām poga SB7 tiek izslēgta un ierīce pāriet darba režīmā.Zāģa rāmja sasvēršanās automātiskās vadības sistēmas pārtraukšana padeves laikā tiek nodrošināta, pieslēdzot padeves ķēdei noslēgkontaktu KV6. startera spolēm KM4 un KM5.