Elektriskā ratiņu piedziņa ar augšējiem celtņiem
Ratiņi ar paceļamo celtni ir neatkarīgs celšanas ierīces elements un ir paredzēti kravu pārvietošanai paceļamā celtņa diapazonā ar tehnoloģiski noteiktu kustības ātrumu un nepieciešamo kravas pozicionēšanas precizitāti. Ratiņu piedziņa ir viena no galvenajām augšējā celtņa aprīkojuma sastāvdaļām.
Ratiņi pārvietojas pa ceļa celtņa sliežu ceļu. Pats tilts pārvietojas virzienā, kas ir perpendikulārs ratiņu kustības virzienam. Uz ratiņiem ir uzstādīts pacelšanas mehānisms, kas ir aprīkots ar āķi (vai elektromagnētu), ar kuru var pārvietot kravu. Ratiņu kustība ir gaisvadu celtņa tehnoloģiskā cikla neatņemama sastāvdaļa (1. att.).
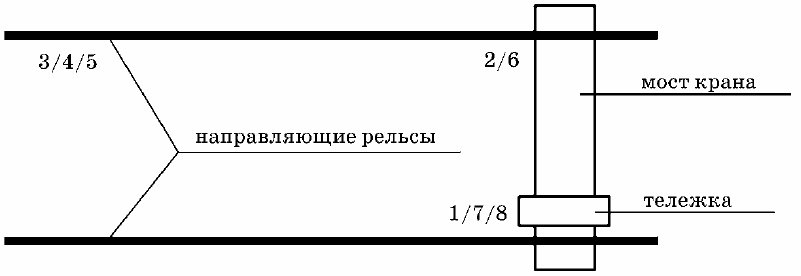
Rīsi. 1. Shēma operāciju veikšanai ar tilta celtni darba ciklā
Šis cikls sastāv no šādām darbībām (1. attēlā operāciju numuri ir parādīti skaitļos):
1 — kravas pacelšana;
2 — ratiņu pārvietošana noteiktā pozīcijā;
3 — celtņa pārvietošana iepriekš noteiktā stāvoklī;
4 — slodzes svara samazināšana;
5 — āķa celšana ar kravas svaru;
6 — celtņa pārvietošana sākotnējā stāvoklī;
7 — ratiņu pārvietošana sākotnējā stāvoklī;
8 — āķa nolaišana.
Kā redzams no augšējā celtņa procesa cikla, ratiņu piedziņas motors tiek ieslēgts otrajā un septītajā darbībā. Kad ratiņi tuvojas noteiktai pozīcijai augšējā celtņa attālumā, ratiņu piedziņas elektromotors tiek elektriski bremzēts, lai nodrošinātu nepieciešamo bremzēšanas precizitāti.
Pēc tam dzinējs tiek izslēgts un tiek iedarbināta mehāniskā bremze. Papildus tiek ieslēgta tilta kustības elektriskā piedziņa un slodze pārvietojas pa darbnīcu atbilstoši tehnoloģiskajam uzdevumam. Sasniedzot norādīto vietu, celtnis apstājas, krava tiek nolaista, un pēc tam tiek veiktas nepieciešamās tehnoloģiskās darbības.

Ratiņu kustības mehānisma ar paceļamajiem celtņiem kinemātiskā diagramma ir parādīta 2. attēlā Ratiņu kustības mehānisms ir izgatavots pēc shēmas ar pārnesumkārbu vidū starp piedziņas riteņiem.
Piedziņa no elektromotora D caur bremžu disku T, pārnesumkārbu P, sajūgiem M un vārpstām B tiek pārsūtīta uz ritošajiem riteņiem. Lai noturētu ratus nekustīgi, tiek izmantots bremžu skriemelis.
Ratiņiem ir četri braukšanas riteņi un divi piedziņas riteņi. Celtņa ratiņu braucošie riteņi parasti ir izgatavoti ar divām ribām.
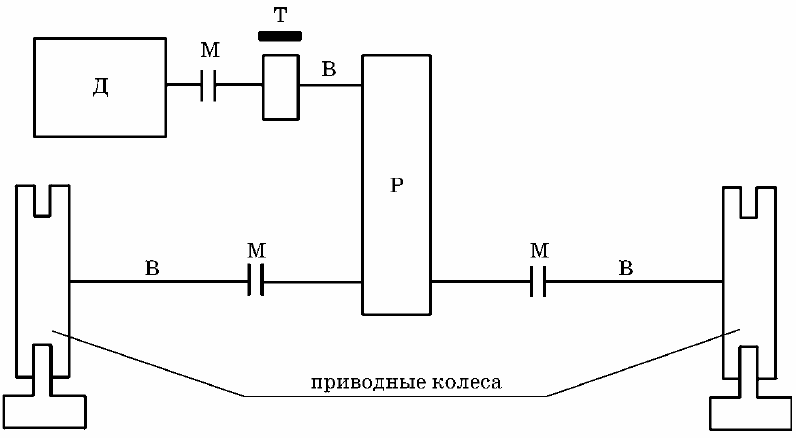
Rīsi. 2. Ratiņu kustības mehānisma kinemātiskā diagramma
Ratu pārvietošanas laiks norādītajā pozīcijā tiks noteikts, ņemot vērā laiku, kas nepieciešams ratu paātrināšanai un palēnināšanai ar nepieciešamo paātrinājumu.Pamatojoties uz tehnoloģiskā procesa nosacījumiem, tahogrammai, pārvietojot ratiņus, jābūt tādai formai, kas parādīta 3. attēlā.
Ir nepieciešams nodrošināt vienmērīgu ratiņu mehānisma iedarbināšanu līdz noteiktam ātrumam ar nepieciešamo paātrinājumu. Lai nodrošinātu nepieciešamo pozicionēšanas precizitāti, ir nepieciešama vienmērīga elektriskās piedziņas palēnināšana ar pāreju uz samazinātu ātrumu, pēc kuras ratiņi apstājas.
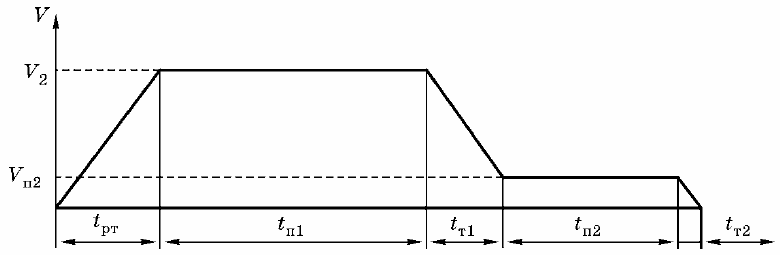
Rīsi. 3. Ratiņu kustības mehānisma tahogramma
Ratiņu kustība ar triecieniem uz metāla konstrukciju sliežu savienojumos, intensīvs paātrinājums un palēninājums, metāla konstrukcijas dabiskās vibrācijas, kad mašīnas tiek noslogotas, rada ļoti intensīvu mehānisku ietekmi uz elektroiekārtām, kas atrodas uz tilta celtņa ratiņiem. Pamatojoties uz to, ratiņu pārvietošanas elektriskajai piedziņai jāatbilst šādām prasībām:
1) elektriskajai piedziņai jānodrošina iespēja iedarbināt mehānismu kustībā, mainīt kustības virzienu un apturēt mehānismu ar nepieciešamo paātrinājumu (m / s2) un pareizu pozicionēšanas precizitāti (mm);
2) elektriskajai piedziņai jānodrošina vienmērīga ātruma kontrole uz leju no galvenās;
3) izstrādātajam dzinēja griezes momentam jānodrošina mehānisma darbība noteiktā intensitātē;
4) pie noteikta dzinēja iedarbināšanas reižu skaita stundā nedrīkst notikt tā tinumu pārkaršana, kā rezultātā iespējama ilgstoša mehānisma apstāšanās;
5) motoram jābūt izvēlētam atbilstoši ekspluatācijas apstākļiem, tas ir, tam jābūt piemērotam konstrukcijai, un tā tinumiem jābūt karstumizturīgiem un ar izolāciju pret mitrumu;
6) piedziņas motoram jābūt ar vismazākajām spararata masām, kas būtiski ietekmē pārejas plūsmu biežu piedziņas iedarbināšanu laikā;
7) piedziņas motoram jāatbilst darba mehānisma jaudai un tam jābūt ar nepieciešamo pārslodzes jaudu;
8) elektropiedziņai jānodrošina pārejas procesu veidošanās ar minimālu ilgumu;
9) elektriskās piedziņas projektēšanā jāņem vērā drošība un apkopes vienkāršība.

Statisko momentu kustības mehānismiem, kas darbojas uz horizontālas sliežu ceļa līnijas ražotnē, rada slīdošie berzes spēki gultņos un ratiņu riteņu rites berze, kas ripo pa virsceļa celtņa sliedēm. Mehānisma statisko momentu ratiņu kustības laikā uz priekšu nosaka celtņa celtspēja. Mehānisma statisko momentu ratiņu kustības laikā aprēķina nepilnai slodzei.
Gaisa celtņu ratiņu elektriskajai piedziņai, asinhronajiem vāveres rotora motoriem (t.sk. kā daļa no mainīgas frekvences piedziņas), tinuma rotora asinhronie motori un neatkarīgi ierosināti līdzstrāvas motori.