Tiristoru pārveidotāju trūkumi
Pašlaik galvenais līdzstrāvas motoru pārveidotāju veids ir cietvielu tiristori.
Tiristoru trūkumi ir šādi:
1. Vienpusēja vadīšana, kā rezultātā nepieciešams dubultot ierīču skaitu.
2. Neliela pārslodzes strāva, kā arī strāvas pieauguma ātruma ierobežošana.
3. Jutība pret pārspriegumu.

Rektificētā sprieguma vidējo vērtību, ja nav regulēšanas, galvenokārt nosaka tiristora pārveidotāja komutācijas ķēde. Pārveidošanas shēmas ir sadalītas divās klasēs: nulles spaile un tilts. Vidējas un lielas jaudas iekārtās galvenokārt tiek izmantotas tiltu pārveidotāju shēmas, kas galvenokārt ir divu iemeslu dēļ:
-
katra tiristora zemāks spriegums,
-
pastāvīgas strāvas sastāvdaļas trūkums, kas plūst caur transformatora tinumiem.
Pārveidotāju shēmas var atšķirties arī pēc fāžu skaita: no viena mazjaudas instalācijās līdz 12-24 lieljaudas pārveidotājos.

Visiem tiristoru pārveidotāju variantiem kopā ar pozitīvām īpašībām, piemēram, zemu inerci, rotējošu elementu trūkumu, mazākiem (salīdzinājumā ar elektromehāniskajiem pārveidotājiem) izmēriem ir vairāki trūkumi:
1. Ciets savienojums ar elektrotīklu: visas tīkla sprieguma svārstības tiek pārraidītas tieši uz piedziņas sistēmu, un slodzes pārspriegums uz motora asīm tiek nekavējoties pārsūtīts uz elektrotīklu un izraisa strāvas pārspriegumu.
2. Zems jaudas koeficients, regulējot spriegumu uz leju.
3. Augstāku harmoniku ģenerēšana, slodze uz elektrotīklu.
Saistībā ar tiristoru un pārveidotāja vienpolāro vadītspēju kopumā vienkāršākajā ķēdē motora apgriešanu viena pārveidotāja klātbūtnē var veikt, tikai pārslēdzot armatūru vai ierosmes spoli, izmantojot piemērotus kontaktorus. Protams, šādos apstākļos elektriskās mašīnas sistēmas darbība būs neapmierinoša, jo ir nepieciešams pārslēgt vai nu lielas strāvas, vai augstas induktivitātes ķēdi. Tāpēc parasti tiek izmantoti divi pārveidotāji, no kuriem katrs ir paredzēts darbam vienā griešanās virzienā.

Tiristoru piedziņas tehniskie un ekonomiskie rādītāji: ātruma regulēšanas diapazons, viena vai otra bremzēšanas, atpakaļgaitas metodes iespēja, mehānisko īpašību veids un citi lielā mērā ir iepriekš noteikti ar barošanas shēmu.
Visu galveno (barošanas) ķēžu shēmu klāstu var samazināt līdz četrām galvenajām iespējām:
1. Līdzstrāvas motora armatūras padeve no viena kontrolēta pārveidotāja.Šī un nākamās diagrammas, lai vienkāršotu rasējumu un identificētu būtiskas atšķirības, ir sniegtas, pieņemot, ka piegāde tiek veikta no vienfāzes maiņstrāvas tīkla.
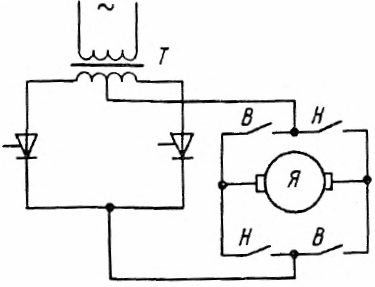
Vadāma pārveidotāja-motora sistēma ar vienu tiristoru pārveidotāju armatūras ķēdē, V, N - kontaktori rotācijai uz priekšu un atpakaļ
Šajā gadījumā ātruma regulēšana tiek nodrošināta, tikai mainot motora armatūrai pievadīto spriegumu; motora reverss — mainot armatūras strāvas virzienu, izmantojot kontaktorus. Bremzēšana ir elektrodinamiska.
Reverso kontaktoru klātbūtne armatūras ķēdē padara uzstādīšanu dārgāku, īpaši ar ievērojamu motora jaudu, kā arī padara to piemērotu tikai mehānismiem, kuriem nav nepieciešama bieža apgriešana un apstāšanās. Ķēde nenodrošina reģeneratīvās bremzēšanas spēju.
2. Motora armatūras barošana no diviem pārveidotājiem, kas savienoti šķērsshēmā. Vienā rotācijas virzienā darbojas viens invertors, otrā - otrs.Pretējais tiek panākts, vadot tiristorus un tiek nodrošināts, pārslēdzot vienu no pārveidotājiem invertora režīmā.
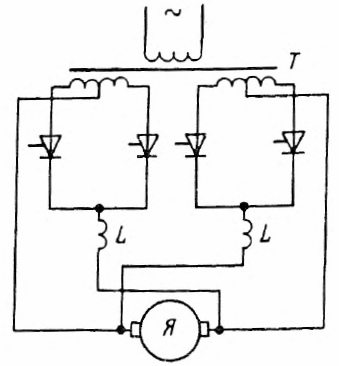 Vadāma invertora-motora sistēma ar diviem invertoriem, kas savienoti krusteniskā ķēdē
Vadāma invertora-motora sistēma ar diviem invertoriem, kas savienoti krusteniskā ķēdē
Shēmai nav nepieciešami apjomīgi atpakaļgaitas kontaktori armatūras ķēdē, tā nodrošina vienmērīgu un uzticamu enerģijas atgūšanas apturēšanu un parasti tiek izmantota biežai reversai.
Ķēdes trūkums ir sarežģītība un augstās izmaksas, jo ir nepieciešams dubults tiristoru komplekts un divkāršs strāvas transformatora sekundāro tinumu skaits.
3. Pārveidotāju paralēlais-pretējais savienojums. Shēmas īpašības ir līdzīgas iepriekšējai.Priekšrocība ir mazāks jaudas transformatora sekundāro tinumu skaits.
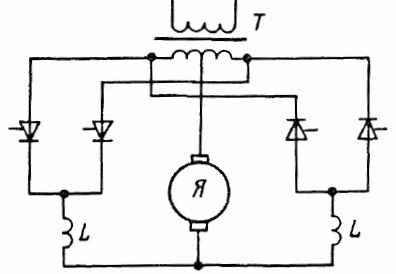
Vadāma invertora-motora sistēma ar paralēlu pretēju pārveidotāju savienojumu
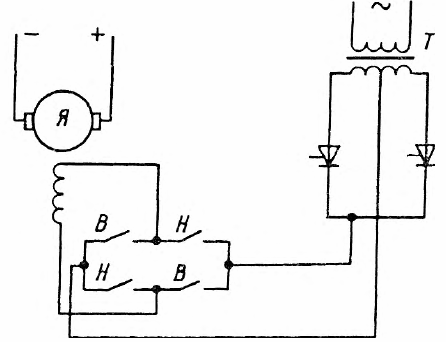
Pārveidotāja-motora sistēma ar kontrolētu pārveidotāju motora ierosmes ķēdē
Ierīce darbojas ar nemainīgu un pietiekami augstu jaudas koeficientu. Un otrādi, mainot strāvas virzienu ierosmes ķēdē, tas pievelk pārejas. Sistēma nav īpaši piemērota mehānismiem, kuriem nepieciešams liels skaits atpakaļgaitas un apstāšanās.