Statiskās slodzes uz galveno celtņa mehānismu dzinējiem
Celtņa pacēlāja motora vārpstas jaudu un griezes momentu statiskā kravas pacelšanas režīmā var aprēķināt pēc formulām
kur P ir motora vārpstas jauda, kW; G ir spēks, kas nepieciešams, lai paceltu kravu, N; G0 — satvērējierīces celšanas spēks, N; M ir motora vārpstas moments, Nm; v ir kravas pacelšanas ātrums, m/s; D ir vilkšanas vinčas trumuļa diametrs, m; η — pacelšanas mehānisma efektivitāte; i ir pārnesumkārbas un ķēdes pacēlāja pārnesumskaitlis.
Nolaišanās režīmā celtņa dzinējs attīsta jaudu, kas vienāda ar starpību starp berzes jaudu Ptr un jaudu, ko izraisa dilstošās slodzes Pgr ietekme:
Nolaižot vidējas un smagas slodzes, enerģija tiek novirzīta no zobrata vārpstas uz motoru, jo Pgr >> Ptr (bremžu atlaišana). Šajā gadījumā motora vārpstas jauda, kW, tiks izteikta ar formulu

Nolaižot vieglas kravas vai tukšu āķi, var būt gadījumi, kad Pgr < Ptr.Šajā gadījumā dzinējs darbojas ar kustības momentu (jaudas nolaišanās) un attīsta jaudu, kW,

Pamatojoties uz dotajām formulām, ir iespējams noteikt celtņa motora jaudu pie jebkuras āķa slodzes. Aprēķinot, jāatceras, ka mehānisma efektivitāte ir atkarīga no tā slodzes (1. att.).
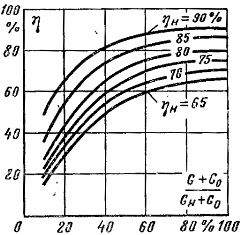
Rīsi. 1. Mehānisma efektivitātes atkarība no slodzes.
Celtņa kustības horizontālo mehānismu motoru jaudu un griezes momentu statiskā darbības režīmā var noteikt ar formulām

kur P ir celtņa kustības mehānisma motora vārpstas jauda, kW; M ir kustības mehānisma motora vārpstas moments, Nm; G — pārvadātās kravas svars, N; G1 — kustības mehānisma pašsvars, N; v — kustības ātrums, m/s; R ir riteņa rādiuss, m; r ir riteņa ass kakla rādiuss, m; μ — slīdēšanas berzes koeficients (μ = 0,08-0,12); f — rites berzes koeficients, m (f = 0,0005 — 0,001 m); η — kustības mehānisma efektivitāte; k — koeficients, kas nosaka riteņu atloku berzi uz sliedēm; i — šasijas reduktora pārnesumskaitlis.
Vairākos pacelšanas un transportēšanas mehānismos kustība nenotiek horizontālā virzienā. Iespējama arī vēja slodzes ietekme utt. Jaudas noteikšanas formulu šajā gadījumā var attēlot kā

Papildus atzīmēts: α — vadotņu slīpuma leņķis pret horizontālo plakni; F — īpatnējā vēja slodze, N / m2; S ir laukums, uz kuru vēja spiediens iedarbojas 90 ° leņķī, m2.
Pēdējā formulā pirmais termins raksturo motora vārpstas jaudu, kas nepieciešama, lai pārvarētu berzi horizontālās kustības laikā; otrais termins atbilst pacelšanas spēkam, trešais ir jaudas komponents no vēja slodzes.
Vairākiem celtņiem ir pagrieziena galds, uz kura atrodas darba aprīkojums. Platformas kustība tiek pārraidīta caur zobratu (griežamo galdu), kura diametrs ir Dkp. Starp platformu un fiksēto pamatni atrodas rullīši (rullīši) ar diametru dp. Šajā gadījumā celtņa motora jauda un griezes moments, ko rada berzes spēki, tiek konstatēti līdzīgi kā abpusējās kustības gadījumā, proti:

Šeit papildus zināmajām vērtībām: G2 ir pagrieziena galda svars ar visu uz tā esošo aprīkojumu, N; ωl — leņķiskais ātrums, platformas, rad/sek; in — pagrieziena mehānisma pārnesumkārbas un transmisijas piedziņas pārnesuma attiecība — pagrieziena galds.

Nosakot celtņa elektriskās piedziņas jaudu, dažos gadījumos ir jāņem vērā slodzes izmaiņas, strādājot uz nogāzes. Vēja slodzi uz rotējošiem mehānismiem nosaka, ņemot vērā atšķirību vēja spēkos, kas iedarbojas uz slodzi, celtņa strēli un pretsvaru.
Projektējot celtņa mehānismu elektriskās piedziņas, dzinēja izvēles beigās tiek pārbaudītas elektriskās piedziņas pieļaujamās paātrinājuma vērtības, par kurām dati norādīti 1. tabulā.
1. tabula Mehānismu nosaukumi un to mērķis
Mehānismu nosaukums un to mērķis Paātrinājums, m/s2 Pacelšanas mehānismi šķidru metālu, trauslu priekšmetu, izstrādājumu, dažādu montāžas darbu celšanai 0,1 Montāžas un metalurģijas cehu parku pacelšanas mehānismi 0,2 — 0,5 Satveršanas celtņu celšanas mehānismi 0,8 Mehānismi precīzas montāžas darbiem un šķidro metālu, trauslu priekšmetu pārvadāšanai paredzēto celtņu kustība 0,1 - 0,2 Kustības mehānismi ar gravitācijas pievilkšanas spēku pie pilnas 0,2 - 0,7 Pilna satvēriena celtņu ratiņi 0,8 - 1,4 Celtņa grozāmie 0,5 - 1,2