Elektriskās piedziņas vadības ķēdes
 Atkarībā no pasažieru liftu ātruma tiek pieņemti šādi jaudas vadības ķēžu veidi:
Atkarībā no pasažieru liftu ātruma tiek pieņemti šādi jaudas vadības ķēžu veidi:
-
zema ātruma liftiem ir vāveres būra vai fāzes rotora motori un pogas vai sviras vadība,
-
ātrgaitas lifti — divu vai viena ātruma motori, ko vada magnētiskās stacijas vai tiristoru vadības stacijas (TSU-R) ar vadības pogām,
-
ātrgaitas un ātrgaitas lifti - līdzstrāvas motori, kurus kontrolē sistēma "ģenerators - motors" ar dažādām ierosmes shēmām vai sistēma "tiristora pārveidotājs - motors" ar pogām,
-
var izmantot arī asinhrono vārstu kaskāžu (AVK) ķēdes, kuru izmantošana ļauj palielināt efektivitāti. uzstādīšana.
Pasažieru lifti atkarībā no pasažieru plūsmas, pacelšanas augstuma un pasažierus apkalpojošo liftu skaita tiek iedalīti vienvietīgajos un grupu vadībās.
Vientuļos ietilpst:
a) lifti, kas darbojas pēc atsevišķiem pasūtījumiem un izsaukumiem, nešķērsojot pieturas pasažieru nolaišanās un pacelšanās laikā,
b) lifti ar pasažieru iekāpšanu, braucot lejā, bet ar izsaukumu aizliegumu, braucot augšup,
c) tas pats, bet ar zvanu reģistrēšanu, lejupejot ar to turpmāko izpildi.
Grupas darbināmos liftos ietilpst:
a) lifti ar vienu pogu nolaišanās vietu izsaukšanai neatkarīgi no uzstādīto liftu skaita (biežāk tiek izmantota dubultā vadība) un ar pasažieru iekāpšanu nolaižoties,
b) tas pats, bet ar pilnīgu pasažieru savākšanu starpstāvos iekāpšanai un izkāpšanai (parasti uzstāda administratīvajās, izglītības un citās ēkās).
Turklāt ļoti bieži tiek sūtīti lifti uz vairākām mājām un veseliem rajoniem, kad ķēdes stāvoklis tiek uzraudzīts no vienas dispečera pults un tiek kontrolēti vairāki lifti.
Neatkarīgi no liftu ātruma, to vienas vai grupas vadības, lielākajā daļā to shēmu nepieciešamie elementi ir šādi:
-
pašregulējošas pogas, lipīgās vai aizvēršanas pogas kabīnes izsaukšanai un pasūtījuma došanai no kabīnes,
-
dažādi atlases sensori un precīzas pieturas saskaņošanas ierīces, lai reģistrētu salona atrašanās vietu un elektrisko ķēžu stāvokli,
-
sensori un bloķētāji pacelšanas trošu stāvoklim, raktuvju un kabīnes durvju stāvoklim (atvērts vai aizvērts),
-
gala slēdži, lai ierobežotu ātrumu un kabīnes slodzes pakāpi,
-
indikatori kabīnes kustības virzienam un dažos liftos kravas klātbūtnei kabīnē.
No šīm pozīcijām mēs sīkāk pakavēsimies pie pozīcijas saskaņošanas ierīcēm (PSC), kas nosaka vietu, kur mīnas automašīnai jāapstājas, kad notiek izsaukums vai pavēle, un tās kustību uz augšu vai uz leju.Pārējās preces parasti ir dažādas robežslēdžu modifikācijas, kas zināmas no citiem kursiem.
Strukturāli pozīciju saskaņošanas ierīces tiek ieviestas raktuvēs izvietotu trīs pozīciju elektromehānisko vai induktīvo vai magnētisko (niedru) sensoru komplekta veidā ar signālu izvadīšanu uz releju vai bezkontakta selektoru mašīntelpā (dažkārt tiek ieviesti CCP centrālo grīdas bloku veidā, kas atrodas mašīntelpā) …
Raktuvēs esošie sensori mijiedarbojas ar kabīnē uzstādītajiem zariem (elektromehāniskajiem) vai magnētiskajiem šuntiem (induktīviem vai niedres slēdžiem) un nosūta signālus uz centrālo grīdas bloku (pakāpju kopētāju vai releja releju), kas uzstādīts mašīntelpā, un pēdējais pārraida un vadības ķēde - signāls saņemtās komandas izpildei.
Automašīnu kustības signālu sensorus lietderīgāk novietot pa vagonu augšā vai lejā (nepieciešams mazāk vadu) un nepieciešamajos punktos raktuvēs ierīkot magnētiskos šuntus. Šajā gadījumā ar digitālo vadību kolonnu skaits ar uzstādītiem šuntiem gar vārpstu ir vienāds ar pārraidītā stāva numura bitu skaitu binārajā vai citā kodā.
Trīs pozīciju elektromehāniskie slēdži tiek pārvietoti uz vienu no pozīcijām, kas atbilst kabīnes kustībai uz augšu vai uz leju, vai tās pieturu, izmantojot saritināšanas mehānismu.Šajā gadījumā, automašīnai braucot, slēdžu kontakti pabraucamajos stāvos tiek ieslēgti vienā no gala pozīcijām, gatavojoties zvanu un rīkojumu ķēdes darbībai, un, automašīnai apstājoties, slēdzis tiek ieslēgts. pārvietots uz vidējo pozīciju, izslēdzot vadības ķēdi no virziena kontaktoriem un tādējādi izslēdzot automašīnu no grīdas, kad tiek kļūdaini nospiesta pasūtījuma vai zvanīšanas poga.
Lai nodrošinātu relatīvi precīzu lifta kabīnes bremzēšanu, nesen to vadības ķēdēs sāka izmantot bezkontakta induktīvos vai ar kontaktu noslēgtos magnētiski vadāmos (niedru) sensorus. Šie sensori ir uzstādīti gan raktuvēs, gan salonā: raktuvēs ir sensori izvēlei (palēnināšanai), bet salonā ir sensors precīzai apturēšanai. Lai izveidotu saskarni ar sensoriem, kabīnē ir novietots laternas magnētiskais selektīvs šunts, un šahtā (katrā stāvā) ir novietoti feromagnētiskie precīzijas apturēšanas šunti.
Induktīvie sensori sastāv no atvērtas U formas magnētiskās ķēdes ar korpusā ievietotu spoli. Izpildreleja tinums ir savienots virknē ar to, un tiem tiek pievienots maiņstrāvas spriegums (U).
Ar atvērtu magnētisko ķēdi magnētiskā plūsma, kas šķērso spoli, ir maza. Līdz ar to e.m.f. un pašindukcijas strāva spoles vados, kā arī tās radītā induktīvā pretestība (X) praktiski nav, tāpēc spoles pretestība ir aktīva (R). Strāva virknē pieslēgtās spoles ir salīdzinoši liela; imitē kontaktu aizvēršanos kontaktu sistēmā (relejs ieslēdzas).
Kad šunts aizver U formas magnētisko ķēdi, palielinās magnētiskā plūsma, kas šķērso tā spoli, un līdz ar to palielinās emf. pašinduktivitāte, kā arī no tās izrietošā spoles induktīvā pretestība. Rezultātā strāva virknē savienotajās spoles samazinās, imitējot ķēdes atvēršanu kontaktu sistēmā (izpildrelejs ir izslēgts).
Niedru slēdzis ir U veida korpuss, kurā vienā rievas pusē ir ievietotas divas noslēgtas stikla kolbas ar vakuumu iekšpusē un kontaktiem, kas piestiprināti uz atsperu plāksnēm, kuras ir savienotas ar attiecīgajām lifta vadības ķēdēm. Otrā slota pusē ir pastāvīgais magnēts. Šādu sensoru darba elements ir feromagnētiskais šunts, kas, pārvietojoties lifta kabīnei, iziet cauri U veida griezumam.
Šo sensoru darbības princips ir šāds: niedru slēdžu kontaktplākšņu atsperu spēki ir vērsti tā, ka, ja pastāvīgā magnēta lauks uz tiem neiedarbojas, tad parasti atvērtie kontakti ir atvērti, un parasti ir atvērti kontakti. slēgtie kontakti ir slēgti, t.i. ķēdes, kurām ir pievienoti šie kontakti, tiks atvērtas vai aizvērtas.
Šis niedru slēdža stāvoklis būs tad, kad feromagnētiskais šunts atrodas U veida korpusa rievā, jo pastāvīgā magnēta magnētiskā lauka līnijas ir aizvērtas šķērsām šuntam. Kad šunts iziet no rievas, magnētiskā lauka līnijas tiek aizvērtas šķērsām. plāksnes, pārvarot savu atsperu darbību, un niedru slēdža kontakti un līdz ar to arī ķēdes, kurām tās ir pievienotas, nonāk pretējā stāvoklī.

Kā piemēru, kas atspoguļo lifta vadības shēmu galvenās iezīmes, apsveriet viena lifta vadības shēmu bez saistītām pieturām, kas parādīta attēlā. 1. Lifts apkalpo četrus stāvus; kā izpilddzinējs tiek izmantots divu ātrumu asinhronais motors M.
Zemu (Ml) vai lielu (B) motora apgriezienu iekļaušanu veic attiecīgie kontaktori Ml un B. Motora griešanās virzienu nosaka kontaktori B un H, palēninājums — ar papildu rezistoru P, apstāšanās — ar elektromagnētisko bremzi ET.
Izmanto kā grīdas slēdžus bezkontakta induktīvie sensori (DTS, DTOV un DTON), kas savienoti virknē ar releja spolēm (RIS, RITOV, RITON). TTP sensori tiek izmantoti, lai ieslēgtu lifta piedziņu lielā ātrumā un dotu impulsu palēninājumam, savukārt DTOV un DTON sensori ir paredzēti, lai precīzi apturētu liftu attiecīgā stāva grīdas līmenī un novietoti uz kabīnes, magnētiskie šunti tiem ir uzstādīti šahtas šahtā.
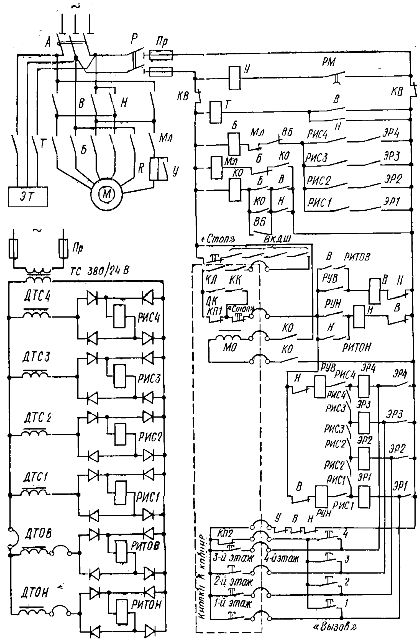
Rīsi. 1. Viena lifta vadības shematiska diagramma
Apskatīsim atlikušo ķēdes elementu mērķi un tā darbību, izmantojot piemēru par kabīnes ar pasažieri pārvietošanu no 1. uz 3. stāvu, pieņemot, ka automāts A, atvienotājs P un gala slēdži KB ierobežo kabīnes kustība uz augšu un uz leju avārijas režīmos, ir slēgtas un kabīne atrodas pirmajā stāvā. Šajā gadījumā RIS releja spoles papildus pirmā stāva relejam plūst no nominālās strāvas.
Nospiežot pogu «3.stāvs», veidojas šāda elektriskā ķēde: tīkla fāze — atdalītāja pols P — drošinātājs Pr — gala slēdzis KB — poga «Stop» — raktuvju durvju bloķēšana D1 — D4 — kontakti spriegošanai. trose KK — drošības gala slēdzis KL — kabīnes durvju slēdži DK — pogas «Stop» kontakti — atvēršanas bloks - kontakts Н — releja spole RUV — releju RIS4 un RISZ aizvēršanas kontakti (šo releju spoles nes strāvu) — spole grīdas releja ERZ — poga «3. stāvs» — atvēršanas bloki — kontaktoru U, B, N kontakti — gala slēdzis KB — drošinātājs R — atvienotāja pols P — tīkla fāze.
Pēc releja RUV un ER3 iedarbināšanas tiek ieslēgts priekšgaitas kontaktors B, ātrās kustības kontaktors B (uz spoles ķēdes B — bloka kontakts ML — ātrgaitas slēdzis VB — releja kontakti RISZ un ER3). Kad kontakti B un B ir aizvērti, motors tiek pieslēgts pie elektrotīkla, kontaktors T, atlaišanas skriemelis un šunta kontaktors KO, kas ieslēdz šunta solenoīdu MO un sagatavo zema ātruma kontaktora spoles Ml ķēdi. ieslēgts. Gājiens ievelkas, atlaižot bloķēšanas sviru, un kabīne sāk kustēties.
Kad kabīne tuvojas trešajam stāvam, feromagnētiskais šunts aizver TTSZ sensora spoli, tā pretestība palielinās, un RISZ relejs pazūd, izslēdzot ER3 un RUV relejus. Rezultātā kontaktors B pazūd, aizverot savu kontaktu, ieslēdz maza ātruma kontaktoru Ml, bet kontaktors B paliek ieslēgts, jo, automašīnai kustoties, precīzā bremžu sensora magnētiskā ķēde vēl nav aizvērta, tāpēc RITOV kontaktpersona vēl nav atvērta.Motors tiek apturēts ar mazu ātrumu, kas darbojas ģeneratora režīmā ar rezistoru R., kas ieviests vienā statora fāzē.
Tiklīdz automašīnas grīda ir izlīdzināta ar grīdas grīdu, magnētiskais šunts aizver precīzā apstāšanās sensora DTOV spoles magnētisko ķēdi, pazūd relejs RITOV un tiek pagriezti kontaktori B, tad KO un visbeidzot ML. izslēgts.Rezultātā motora elektromagnēts un bremzes tiek atvienotas no elektrotīkla, tiek iedarbināta mehāniskā bremze un kabīne tiek apturēta.
Apgūt kolektīvo shēmu liftu vadīšanai ar garāmbraucošām pieturām tikai nolaižot kabīni vai pilnībā kolektīvu shēmu, t.i. braucot garām pieturām, automašīnai pārvietojoties uz augšu un uz leju, tas ir nepieciešams shēmā, kas ir līdzīga tai, kas apskatīta 1. 1, ieviest dažus papildinājumus. Piemēram, divu ātrumu motora ķēdē ID induktīvie sensori, RIS relejs un zvanīšanas un pasūtīšanas pogas katrā stāvā ir iekļauti, kā parādīts attēlā. 2.
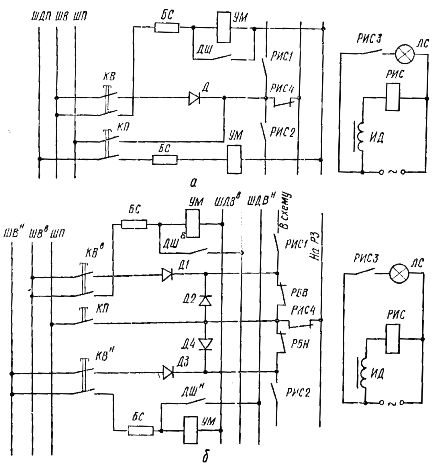
Rīsi. 2. Kolektīvo liftu vadības shēmu papildinājumu fragmenti (viens stāvs)
Shēmā ar garāmbraucošām pieturām, nolaižot kabīni (2. att., a), zvani un rīkojumi tiek doti ar atsevišķām lipīgām pogām, tāpēc tos var reģistrēt jebkurā laikā un nekavējoties pārsūtīt uz shēmu, izņemot transportlīdzekļa kustības periodu. kabīne ar pasažieriem augšā, kad pārvades kontaktu barošanas kopne izsaukumus uz izpildshēmu atslēdz selektīvie kontakti no pozitīvās kopnes.
Pilnajā selektīvās vadības shēmā (2. att., b) papildus ir iekāpšanas (ШДВв) un nolaišanas (ШДВн) kabīņu zvana shēmas, bloķēšanas releju RBV un RBN kontakti ir savienoti ar selektīvās sekciju ķēdes izpildshēmas kontaktiem. .
Diagrammās, kas parādītas zīm. 1 un 2, ja uz grīdas nav kabīnes, ID induktīvā sensora spoles un RIS relejs tiek darbināti. Tāpēc, nospiežot komandu komandas pogu vai izsaucot KV (tos atrodas ieslēgtā stāvoklī UM fiksējošie magnēti, līdz tos pārvar raktuvju durvju kontakti šajā DSh stāvā), veidojas ķēde (nevis attēlos), kas ietver augšup vērsto vadības releju RUV, ja galamērķa stāvs ir augstāks par autostāvvietas grīdu, vai lejupvērsto vadības releju LVL, ja galamērķa stāvs atrodas zem autostāvvietas.
Pēc automašīnas ierašanās izsaukuma stāvā tiek izvadīts induktīvā sensora ID, tiek izslēgts RIS relejs, atverot tā kontaktus, kas izslēdz RUV vai RUN releju un LS lampu (auto apstājas), un noslēdzot RIS4 kontaktu, tiek sagatavota ķēde no auto nākoša pasūtījuma izpildei.
Pilnajā kolektīvajā ķēdē ķēde, kas sadalīta ar kontaktiem RIS1 un RIS2 automašīnas stāvlaukuma grīdā, tiek pārtraukta ne tikai ar šiem kontaktiem, bet arī ar bloķēšanas releja kontaktiem uz augšu RBV vai uz leju RBN (to spoles nav parādīti diagrammā), un pacelšanas, nolaišanas un sakārtošanas ķēdes ir atdalītas viena no otras ar atdalīšanas diodēm D1–D4.
Pirms zvana vai pasūtījuma pogas nospiešanas, ja transportlīdzekļa braukšanas virziens vēl nav izvēlēts, visi virziena izvēles ķēdes kontakti ir aizvērti, izņemot RIS4 kontaktus stāvvietas grīdā.Tāpēc, nospiežot vienu no šīm pogām, izsaukuma signāli no stāviem, kas atrodas virs autostāvvietas grīdas, tiek savienoti ar releja spoli RUN, un izsaukuma signāli no stāviem zem autostāvvietas ietver releja RUV. Pēc virziena izvēles vienlaikus ar RUV vai LVL releju ieslēdzas viens no pretējā virziena bloķēšanas relejiem RBV vai RBN, kas ar saviem kontaktiem pārtrauc izeju caur nepārejošu izsaukuma signālu sekciju ķēdi.
Shēmā, kas parādīta attēlā. 2, a, lai nolaistu pasažierus, kabīne bez apstāšanās dodas uz sarunu augstāko stāvu un pēc tam nolaižas ar garāmbraucošām pieturām, un diagrammā, kas parādīta att. 2, b, ja nepieciešams uzņemt pasažierus, kabīne iet uz izsaukuma zemāko stāvu, pēc tam paceļas ar garāmbraucošām pieturām.
Aplūkotajās shēmās selektori tiek izgatavoti uz releja elementiem. Līdztekus tam tiek izmantoti arī citi selektori: izciļņa, fotoelektrisks, nepārtraukta otas izsekošana, pakāpšanās, uz statiskiem elementiem utt.
Pie lielām pasažieru plūsmām vienā koridorā ir uzstādīti vairāki lifti, kuriem ir apvienota vadība pa pāriem vai grupām, lai palielinātu komfortu un uzlabotu jaudu. Grupās savienoto liftu skaits parasti nepārsniedz četrus, bet biežāk trīs, lai gan ir zināmas sistēmas, kurās grupā ir līdz astoņiem liftiem.
Grupas kontrolē parasti ir trīs galvenie lifta darbības režīmi: maksimālā pacelšanās, maksimālā nolaišanās un līdzsvarota kustība abos virzienos. Liftu aktivizēšanu vienam vai otram režīmam veic dispečers vai automātiski, izmantojot katrai liftu grupai uzstādīto programmēšanas pulksteni.
Daudzstāvu ēkās katra liftu grupa ir fiksēta, lai apkalpotu noteiktu stāvu laukumu, citus stāvus tā neapkalpo. Ja grupā ir vairāki lifti, kas apkalpo vienu teritoriju vai mazstāvu ēku, lai palielinātu vidējo kustības ātrumu, samazinot pieturu skaitu, pāra un nepāra stāvu apkalpošanai var tikt iedalīti atsevišķi lifti.
Lai veiktu liftu divkāršu vai grupu vadību, to vadības ķēdēm jābūt kolektīvām, un izsaukumi uz katru stāvu abos virzienos ir jāreģistrē atsevišķi katrā virzienā, izmantojot piemērotas atmiņas ierīces, kas satur relejus, tranzistorus utt.
Kā piemēru, kas atspoguļo darbības specifiku liftu pāra vadībā ar pirmā lifta 1PC un otrā lifta 2PC papildu parkošanās relejiem, aplūkosim attēlā redzamās shematiskās diagrammas fragmentu. 3.
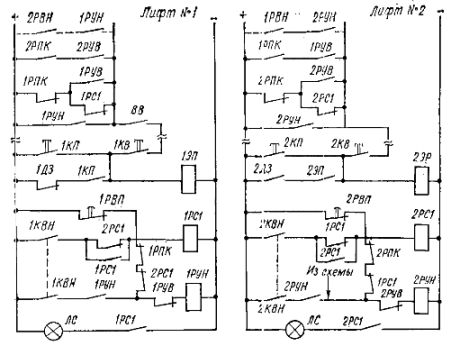
Rīsi. 3. Pārī savienotās lifta vadības shematiskās shēmas fragments: ER — grīdas relejs, RPK — kanālu pārslēgšanas relejs, RVP automātiskās palaišanas relejs
Šajā gadījumā automašīna, kas nolaidusies ar pasažieriem pirmajā stāvā, neatbild uz zvaniem no citiem stāviem un gaida pasažierus. Ja pirmajā stāvā nav automašīnas, tad automašīna, kas pēc pasūtījuma pacēlās un tiek atbrīvota, tiek automātiski nosūtīta uz pirmo stāvu, un, kad tiek nolaista vai novietota cita automašīna, pēdējā paliek uz grīdas lidojuma beigās. vai dodas uz iekraušanas centru un tiek izmantots izsaukuma darbībai galvenokārt grimšanas virzienā.
Pirmā stāva kabīnes stāvvietas relejs 1PC1 vai 2PC1 tiek ieslēgts pēc pirmā stāva kabīnes ierašanās no gala slēdža 1KVN vai 2KVN (uzstādīts kopētāju raktuvēs). Šie releji ir bloķēti.Līdz ar to viena no tām iekļaušana liecina, ka šī automašīna pirmajā stāvā ieradusies agrāk par otru. Šādā gadījumā relejs 1PC1 vai 2PC1 ar savu aizvēršanas kontaktu ieslēdz LS signāllampu un ar atvēršanas kontaktu pārtrauc sava lifta zvana ķēdi, pārtraucot zvanu, kamēr automašīna atrodas stāvvietā pirmajā stāvā.
Kad kabīne izbrauc no pirmā stāva, tās LS signāllampiņa nodziest, strāvas padeve šī lifta izsauktajām ķēdēm tiek atjaunota uzreiz pēc kabīnes atlaišanas, savukārt pēc cita lifta kabīnes pienākšanas pirmajā stāvā tiek ieslēgts tā datora relejs. ieslēgts. Šī kajīte paliek pirmajā stāvā un gaida pasažierus (par ko signalizē, iedegoties LS brīdinājuma lampiņai). Kad kārtībā nonākušais auto tiek atbrīvots un izsaukumu nav, uz ķēdi, kas ieslēdz releja spoles 1RUN vai 2RUV 1RUN vai 2RUV, tiek nosūtīts signāls caur gala slēdža 1KVN vai 2KVN atvēršanas kontaktiem, un automašīna. iet uz pirmo stāvu, un t .n.
Tipisko vienvietīgo, divvietīgo un grupu vadības liftu motora vadības iekārtas parasti atrodas uz tipiskiem paneļiem, stacijām vai vadības blokiem, kas uzstādīti mašīntelpās.