Elektrisko pacēlāju un celtņa siju elektriskā piedziņa
 Piekaramie elektriskie ratiņi (elektrificētie pacēlāji, pacēlāji un celtņa sijas) tiek izmantoti kravu un mašīnu detaļu pacelšanai un pārvietošanai montāžas un remontdarbu laikā ražošanas telpās. Elektriskie pacēlāji, pacēlāji un celtņi ir mazāki par tilta celtņiem, kas samazina ražošanas ēku izmērus un to uzturēšanai nav nepieciešams kvalificēts personāls.
Piekaramie elektriskie ratiņi (elektrificētie pacēlāji, pacēlāji un celtņa sijas) tiek izmantoti kravu un mašīnu detaļu pacelšanai un pārvietošanai montāžas un remontdarbu laikā ražošanas telpās. Elektriskie pacēlāji, pacēlāji un celtņi ir mazāki par tilta celtņiem, kas samazina ražošanas ēku izmērus un to uzturēšanai nav nepieciešams kvalificēts personāls.
Piekaramie elektriskie ratiņi ir paredzēti preču pacelšanai un pārvietošanai ražošanas iekārtās pa stingri noteiktu ceļu.
Elektroiekrāvējs (1. att.) sastāv no 3 galvenajām daļām: pacelšanas mehānisma (elektriskais pacēlājs), kas paredzēts kravas pacelšanai (nolaišanai) un noturēšanai, kustības mehānisma (šasijas), kas paredzēts paceltās kravas pārvietošanai stingri noteiktā pozīcijas virzienā. , monosliede, kas nosaka horizontālu kustību divos virzienos.
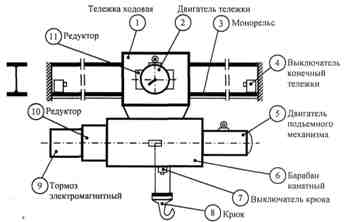
Rīsi. 1. Piekārtā elektriskā ratiņa kinemātiskā diagramma
Elektriskais pacēlājs ir uzstādīts uz darba ratiņiem un ietver šādu aprīkojumu: pacelšanas mehānisma elektromotors (5), cilindriskā pārnesumkārba (10) elektromotora griešanās ātruma samazināšanai līdz vērtībai, kas nodrošina noteiktu lineāro ātrumu paceļot (nolaižot) āķi, elektromagnētisko bremzi (9), lai apturētu vārpstas motoru, kad tas ir atvienots no elektrotīkla vai tīklā pazūd spriegums, tiek iedarbināta bremžu bremze, kas iedarbojas uz atsperu spēku, kad vārpstas ir aptītas ap vārpstu, āķa gala slēdzis (7), lai ierobežotu āķa pacelšanu, nospiežot, motors tiek atvienots no tīkla un palēninās, troses trumulis (6), uztīšanai ( attīšana) un virves, āķa (8) uzglabāšana paceltās kravas nostiprināšanai.
Šasija ir uzstādīta uz monosliedes (3), ko atbalsta skriešanas riteņi uz dubultās sliedes apakšējiem atlokiem. Riteņu dzīšana cauri cilindriskai pārnesumkārbai (11) ar elektromotoru (2).
Monorail — I-baļķis ar gala slēdžiem (4) galos, lai ierobežotu horizontālo kustību.
Elektriskais pacēlājs TEP-1 (kravnesība 1 t, spriegums 380 V) sastāv no pacelšanas un pārvietošanas mehānismiem ar atsevišķām elektriskajām piedziņām. Darba cilindru 2 darbina dzinējs 20 caur planetāro pārnesumkārbu, kas sastāv no satelītiem 5, 7, 8, bloka zobrati 13, saules zobrati 6, 9, nesējs 14, 15. Galvenā piedziņas vārpsta 4, kad dzinējs ir izslēgts ar diskiem 10 11. pavasara iedarbībā.
Pacelšanas mehānisma vadīšanai ar ātrumu 6,5–6,9 m / s tiek izmantots AOS-32-4M tipa asinhronais motors ar palielinātu slīdēšanu (jauda 1,4 kW pie 1320 apgr./min un darba cikls = 25%).Āķa kustību uz augšu ierobežo ierobežošanas slēdzis.
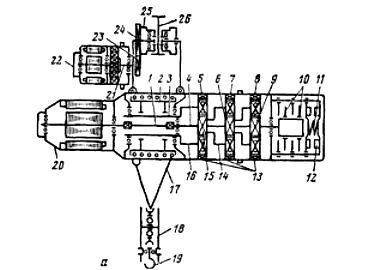
Rīsi. 2. Elektriskā pacēlāja TEP -1 elektriskā piedziņa: 1 — darba trumulis, 3 — dobā vārpsta, 4 — darba vārpsta, 5, 7, 8 — pavadoņi, 6, 9, 15 — saules zobrati, 10 — bremžu diski, 11 — bremžu atspere, 12 — elektromagnēti, 13 — bloka zobrati, 14, 16, 21 — nesēji, 17 — trose, 18 — balstiekārta, 19 — āķis, 20 — elektromotors kravas pacelšanai, 22 — ratiņu elektromotors, 23, 24 — zobrati, 25 — veltnis, 26 — monorail.
3. attēlā parādīta pacēlāja darbība. Elektriskā pacēlāja efektivitāte palielinās līdz 0,58, palielinoties paceltās kravas masai līdz 1000 kg.
Interesants 4. motora darbības režīms, nolaižot slodzi: kamēr kravas svars ir mazāks par 425 kg, elektromotors darbojas motora režīmā, bet, ja masa pārsniedz 425 kg, — ģeneratora režīmā. Tāpēc, lai pārvarētu pacelšanas mehānisma tukšgaitas momentu, pietiek ar 425 kg smagu kravu.
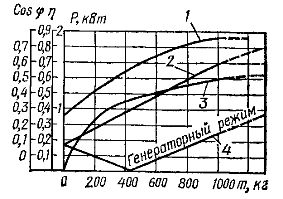
Rīsi. 3. Elektriskā pacēlāja darbības raksturlielumi: 1 — elektromotora ssphi, 2 — elektromotora jauda, paceļot kravu, 3 — efektivitāte, 4 — elektromotora jauda, nolaižot kravu.
Elektriskā pacēlāja šasijas piedziņai tiek izmantots TEM-0,25 tipa asinhronais elektromotors 22 (2. att.) (jauda 0,25 kW pie 1410 apgr./min un darba cikls = 25%) ar iebūvētu planetāro vienpakāpes pārnesumkārbu un zobrats 23, 24, pārvada rullīšu rotāciju 25. Uz vienkāršāko pacēlāju kustības mehānismiem bremzēšanas ierīces nav uzstādītas. Pacēlāja kustība pa siju abos virzienos ir ierobežota ar mehāniskiem aizturiem.
 Strēles celtnis atšķiras no pacēlāja ar to, ka sija, pa kuru pārvietojas pacēlājs, var pārvietoties pa ražošanas telpu, ko darbina vāveres būris vai fāzes rotora elektromotors. Celtņa siju tilts, kuram ir elektriskās piedziņas mehānisms, ir izgatavots viena sijas veidā, pa kuru pārvietojas elektriskā šasija.
Strēles celtnis atšķiras no pacēlāja ar to, ka sija, pa kuru pārvietojas pacēlājs, var pārvietoties pa ražošanas telpu, ko darbina vāveres būris vai fāzes rotora elektromotors. Celtņa siju tilts, kuram ir elektriskās piedziņas mehānisms, ir izgatavots viena sijas veidā, pa kuru pārvietojas elektriskā šasija.
Trīsfāzu asinhronie motori ar vāveres korpusa rotoru tiek izmantoti piekarināmo elektromobiļu vadīšanai un tikai ar lielu kravnesību un nepieciešamību pēc ātruma regulēšanas un vienmērīgas slodzes-asinhrono motoru "nosēšanās" ar fāzes rotoru.
Tā kā trūkst zema ātruma, kas nepieciešams vienmērīgai kravu nolaišanai vai precīzai celtņa apturēšanai, darbiniekam periodiski jāieslēdz un jāizslēdz elektromotori, un tas palielina iedarbināšanas reižu skaitu un izraisa tinumu sildīšanu, kā arī samazina kontaktu nodilumizturība. Tāpēc dažiem celtņiem ir elektriskās piedziņas celšanai un braukšanai ar diviem darba ātrumiem: nominālo un samazināto, kas tiek nodrošināti, izmantojot divu ātrumu asinhronos motorus viena ātruma vai papildu mikropiedziņas vietā.
 Zema ātruma (0,2–0,5 m/s) piekaramos elektriskos ratiņus, ko darbina vāveres motori, parasti kontrolē no grīdas (zemes) līmeņa, izmantojot piekārtus spiedpogu stacijas… Gaisa ratiņos un celtņos ar kabīni operatoram (ar ātrumu 0,8–1,5 m/s) motorus ar fāzes rotoru vada kontrolieri.
Zema ātruma (0,2–0,5 m/s) piekaramos elektriskos ratiņus, ko darbina vāveres motori, parasti kontrolē no grīdas (zemes) līmeņa, izmantojot piekārtus spiedpogu stacijas… Gaisa ratiņos un celtņos ar kabīni operatoram (ar ātrumu 0,8–1,5 m/s) motorus ar fāzes rotoru vada kontrolieri.
Pacēlāju un gaisvadu celtņu elektromotorus kontrolē reversīvie magnētiskie starteri un starta pogas, kas piekārtas pie elastīga bruņu kabeļa.Spriegums uz spolēm un kontaktoru kontaktiem KM1 pacelšanai (4. att.), KM2 nolaišanai, KMZ pārvietošanai uz priekšu un atpakaļ KM4 tiek piegādāts caur automātisko slēdzi un kabeli vai kontaktvadiem. Pacelšanas ierīces kustību uz augšu ierobežo gala slēdzis. SQ.
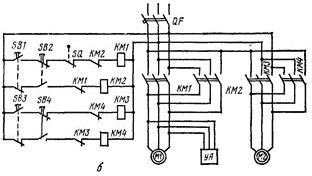
Rīsi. 4. Celtņa sijas elektriskā shematiskā diagramma
Motoru reverso kontaktoru bloķēšana no vienlaicīgas ieslēgšanas tiek veikta, izmantojot dubultās ķēdes pogas un pašu kontaktoru mehānisku bloķēšanu (vai kontaktoru palīgkontaktu atvēršanu).
Elektriskajiem pacēlājiem un paceļamajiem celtņiem palaišanas pogas netiek apietas ar atbilstošajiem aizvēršanas kontaktora bloķēšanas kontaktiem, neļaujot pacēlājam turpināt darboties pēc tam, kad operators ir atlaidis spiedpogas piekaramo staciju. Vienlaikus ar pacelšanas motoru tiek iedarbināts UA solenoīds, kas atver bremzi.
Maksimālais pieļaujamais iedarbināšanas laiks pacelšanas mehānismiem ir 3 — 5 s, kustības mehānismiem — 10 — 15 s.
Varat arī redzēt: Elektrisko pacēlāju elektroiekārtas un ķēdes
Elektrisko kravas automašīnu, elektrisko pacēlāju un gaisvadu celtņu dzinēju darbības režīms ir atkarīgs no to mērķa. Ja preces tiek pārvietotas ar tilta celtņiem nelielos attālumos, tad dzinēji strādā apkaunojošā īslaicīgā režīmā (piemēram, ratiņos, kas apkalpo darbnīcu vai noliktavu sekcijas).

Gaisa celtņiem, kas pārvadā preces pa rūpnīcas teritoriju salīdzinoši lielos attālumos, celšanas un pārvietošanas dzinēju darbības režīmi ir atšķirīgi: pirmajam raksturīgs īslaicīgs režīms, otrajam ilgtermiņa režīms. elektrisko pacēlāju, pacēlāju un portālceltņu celšanas un pārvietošanas dzinējus nosaka tāpat kā gaisvadu celtņu mehānismu dzinējiem.