Kas ir lineārais diferenciālais transformators
Maiņstrāvu, kas plūst vienā primārajā spolē, var izmantot, lai inducētu maiņspriegumu divās sekundārajās spolēs. Ja abi sekundārie tinumi pēc to raksturlielumiem ir identiski un abi magnētiskā lauka līniju ceļi, kas iet caur šīm spolēm, arī ir identiski, tad divi radītie sekundārie spriegumi būs vienādi. Ierīci ar šādu struktūru sauc par diferenciālo transformatoru.

Diferenciālajam transformatoram var būt gaisa vai magnētiskā serde.
Divus sekundāros tinumus var savienot vai nu fāzē, vai pretfāzē, pirmajā gadījumā to spriegumus pievieno viens otram un otrajā atņem vienu no otra.
Primāro tinumu izmanto, lai vadītu divus simetriskus sekundāros tinumus, no kuriem pēdējo var savienot tā, lai sekundārie spriegumi pievienotu vai atņemtu viens otru.
Ja divas spoles ir savienotas saskaņā ar atņemšanas shēmu, tad pie vienādām to spriegumu vērtībām kopējais sekundārais spriegums būs nulle.Ja vienas no šīm spolēm magnētiskās ķēdes raksturlielumi tiek apzināti mainīti salīdzinājumā ar otras spoles magnētiskās ķēdes raksturlielumiem, tad divi sekundārie spriegumi atšķirsies un to atšķirība nebūs nulle.
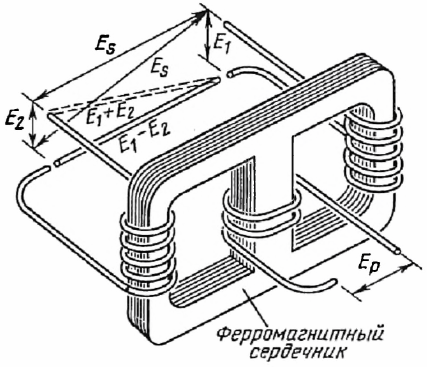
Šādos apstākļos kopējā sekundārā sprieguma fāze norāda, kuram magnētiskā lauka līniju ceļam ir vislielākā pretestība, savukārt šī sprieguma amplitūda atspoguļo pretestības starpības vērtību.
Ja viena un tā pati darbība tiek izmantota, lai palielinātu viena ceļa magnētisko pretestību un samazinātu otra ceļa magnētisko pretestību, tad izejas spriegums, kas atspoguļo šo darbību, sasniedz maksimālo vērtību, un pārneses funkcijai būs vislielākā iespējamā linearitāte.
Tā kā nevar izveidot pilnīgi vienādus divus sekundāros tinumus un divus magnētiskā lauka līniju ceļus, diferenciālajam transformatoram vienmēr ir noteikts izejas spriegums, pat ja ieejā nav noderīgā signāla.
Turklāt magnētisko ķēžu raksturlielumi ir nelineāri. Šīs nelinearitātes rezultātā rodas pat pielietotā primārā ierosmes sprieguma pamatfrekvences harmoniskās sastāvdaļas, kuras nevar pilnībā kompensēt nevienā sekundāro tinumu izvietojumā.
Gaisa spraugas feromagnētiskās ķēdes pretestība ir atstarpes platuma funkcija ar spēcīgu nelinearitāti. Rezultātā ap šādu ķēdi aptītas spoles induktivitāte ir arī nelineāra spraugas platuma funkcija.
Tajā pašā laikā, ja ir divi vairāk vai mazāk identiski magnētiskā lauka līniju ceļi, katrs ar gaisa spraugu, un ja vienas spraugas platums palielinās, samazinoties otras, tad šo līniju magnētiskās pretestības atšķirība. ceļi var mainīties pietiekami lineāri.
Diferenciālā transformatora pamatprincipi praksē tiek iemiesoti dažādās īpašās konstrukcijas konfigurācijās daudziem dažādiem mērķiem.
Lineārais mainīgais diferenciālais transformators (LVDT) ir pasīvs devējs (sensors), kas darbojas pēc savstarpējas indukcijas principa un ar to var mērīt pārvietojumu, deformāciju, spiedienu un svaru.
Visbiežāk tos, izmantojot NS, var izmantot, lai izmērītu pārvietojumu diapazonā no vairākiem milimetriem līdz centimetriem, tieši pārvēršot I'm nobīdi elektriskajā signālā.
Spoles induktivitāte, kuras tuvumā vai iekšpusē atrodas feromagnētiskais stienis, ir šī stieņa stāvokļa koordinātas funkcija attiecībā pret spoli ar spēcīgu nelinearitāti.
Ja šāds stienis ir kāda diferenciālā transformatora feromagnētiskā ķēde, tad sekundārais diferenciālais spriegums var kalpot par stieņa nobīdes indikatoru, pietiekami lineāri atkarībā no šī pārvietojuma.
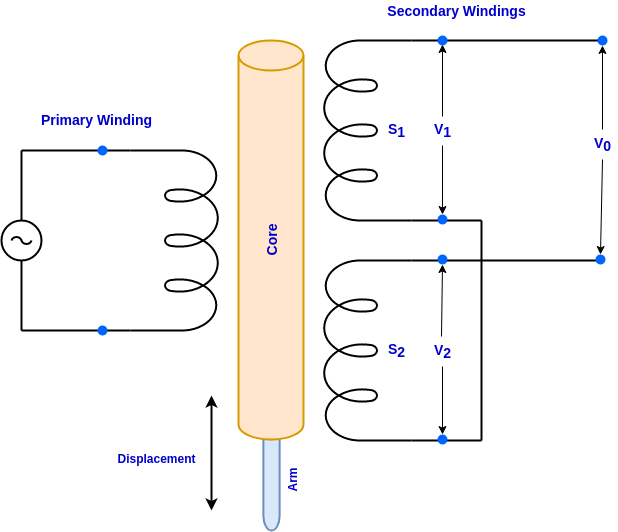
Primārais tinums ir savienots ar maiņstrāvas avotu. Abiem sekundārajiem tinumiem S1 un S2 ir vienāds apgriezienu skaits, un tie ir uzstādīti virknē pretī viens otram.
Tādējādi šajos tinumos inducētais EML ir par 180° fāzē viens pret otru, un tādējādi kopējais efekts izzūd.

Diferenciālā transformatora konstrukcijā paredzētā simetriskā feromagnētiskā serdeņa novietojums ir nosakāms pēc sekundārā sprieguma fāzes un amplitūdas.
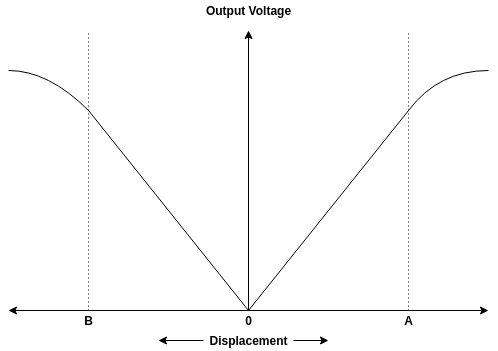
Absolūtā atšķirība starp diviem sekundārajiem spriegumiem norāda stieņa nobīdes absolūto vērtību attiecībā pret centru vai nulles pozīciju, un šī atšķirīgā sprieguma fāze norāda pārvietošanās virzienu.
Lineārā mainīgā diferenciālā transformatora B / I līkne ir parādīta attēlā.
Lineārā diferenciālā transformatora izmantošanas piemērs, lai nodrošinātu precīzu pozīcijas atgriezenisko saiti vārstu uzraudzībai un kontrolei ķīmiskajās rūpnīcās, spēkstacijās un lauksaimniecības iekārtās:
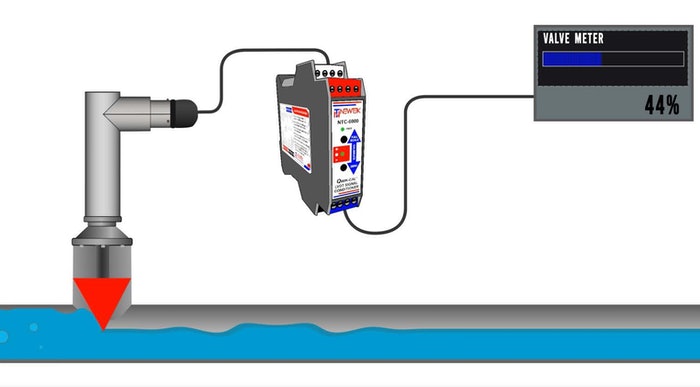
Iegremdējamie pārvietošanas sensori LVDT D5W:
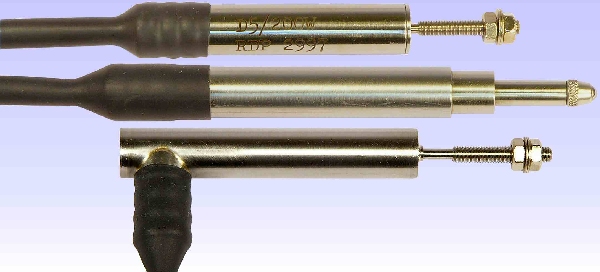
Šie devēji ir paredzēti pārvietojuma un stāvokļa mērīšanai. Tie nodrošina precīzu armatūras (bīdāmās daļas) stāvokļa mērīšanu attiecībā pret pārvietošanās sensora korpusu.
Iegremdējamie pārvietošanas devēji ir paredzēti mērījumu veikšanai, kad tie ir iegremdēti piemērotos šķidrumos. Nemagnētiski šķidrumi var appludināt armatūras cauruli, neietekmējot pārveidotāja darbību. Šie pārveidotāji ir pieejami nekontrolējamās vai atsperu atgriešanās versijās.
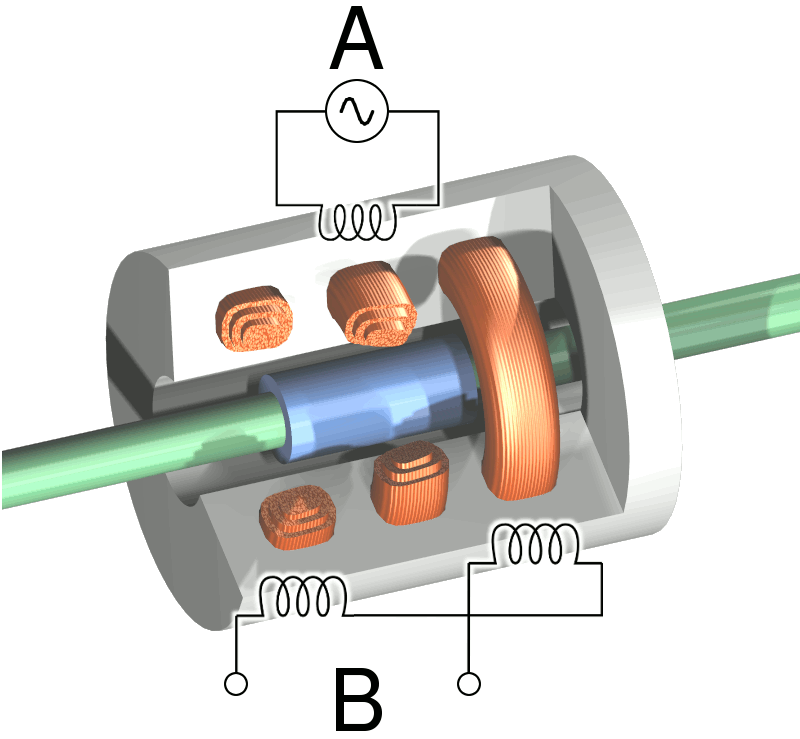
Automatizējot dažādus tehnoloģiskos procesus, bieži tiek izmantoti divpusējie pārveidotāji ar diferenciālo transformatoru ar feromagnētisko serdi, kas savos galos vienādos attālumos tiek ievietots divās sekundārajās spoles.
Kad stienis pārvietojas aksiāli, tas virzās dziļāk vienā no šīm spolēm un stiepjas no otras.Absolūtā atšķirība starp diviem sekundārajiem spriegumiem norāda stieņa nobīdes absolūto vērtību attiecībā pret centru vai nulles pozīciju, un šī atšķirīgā sprieguma fāze norāda pārvietošanās virzienu.
Rotējošais maiņstrāvas diferenciālais transformators:
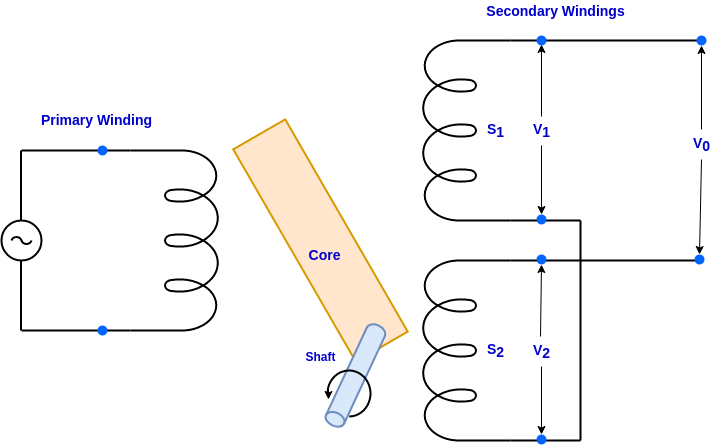
Rotējošais mainīgais diferenciālais transformators ir pasīvs transformators, kura pamatā ir savstarpējas indukcijas princips. To izmanto, lai izmērītu leņķisko nobīdi.
Tā konstrukcija ir līdzīga lineārā mainīgā diferenciālā transformatora konstrukcijai, izņemot serdes konstrukciju.
Primārais tinums ir savienots ar maiņstrāvas avotu. Abiem sekundārajiem tinumiem S1 un S2 ir vienāds apgriezienu skaits, un tie ir uzstādīti virknē pretī viens otram.
Lineārā diferenciālā transformatora priekšrocības:
-
Starp serdi un spolēm nav fiziska kontakta;
- Augsta uzticamība;
-
Ātra atbilde;
-
Ilgs kalpošanas laiks.
Tas ir visplašāk izmantotais induktīvais sensors augstās precizitātes dēļ.