Tehnoloģisko parametru sensori — spēks, spiediens, griezes moments
Lai īstenotu automatizētu un ļoti precīzu tehnoloģisko procesu kontroli, jūsu rīcībā vienmēr ir jābūt informācijai par galveno tehnoloģisko parametru aktuālajām vērtībām. Parasti šim nolūkam tiek izmantoti dažādi sensori: spēki, spiediens, griezes moments utt.. Apskatīsim trīs veidu sensorus, sapratīsim to darbības principu.

Pirmkārt, mēs atzīmējam, ka spēka vai griezes momenta sensoru konstrukcijā tiek izmantoti jutīgi elementi, kuru noteiktas īpašības mainās atbilstoši aktuālajai deformācijas pakāpei, kas izriet no vienas vai otras ārējās ietekmes.
Tās var būt elastīgas metāla plāksnes, atsperes vai vārpstas, kuru deformācija tiek pārnesta uz magnetostriktīvu, pjezoelektrisku vai pusvadītāju elementu, kura elektriskie vai magnētiskie parametri būs tieši atkarīgi no deformācijas pakāpes. Pietiks izmērīt šo parametru, lai iegūtu priekšstatu par deformācijas lielumu un attiecīgi spēku (spiedienu, griezes momentu).
Tenzometriskie deformācijas mērītāji

Vienkāršākais deformācijas mērītājs, pamatojoties uz deformācijas vadu pārveidotājs ietver mehāniski elastīgu elementu, kas tiek pakļauts deformācijai, un tam piestiprinātu deformācijas mērītāju, kura deformācija tiek tieši pārveidota par elektrisko signālu.
Plāna (ar diametru no 15 līdz 60 mikroniem) nihroma, konstantāna vai elinvara stieple, kas ir salocīta ar čūsku un piestiprināta pie plēves pamatnes, darbojas kā deformācijas sensors. Šāds devējs ir pielīmēts pie virsmas, kuras deformācija ir jāmēra.
Mehāniskā elastīgā elementa deformācija noved pie stieples stiepšanās vai saspiešanas visā garumā, savukārt tā šķērsgriezums samazinās vai palielinās, kas ietekmē pārveidotāja pretestības izmaiņas elektriskajā strāvā.
Izmērot šo pretestību (sprieguma kritumu pāri tai), mēs iegūstam priekšstatu par mehāniskās deformācijas lielumu un attiecīgi spēku, ja ir zināmi deformētā elementa mehāniskie parametri.
Spiediena mērītāja griezes momenta sensori

Spēka momenta mērīšanai tiek izmantoti jutīgi elastīgi elementi atsperu vai plānu vārpstu veidā, kas tehnoloģiskā procesa laikā tiek savīti. Elastīgo leņķisko deformāciju, tas ir, atsperes sākuma un beigu relatīvo leņķi mēra un pārvērš elektriskajā signālā.
Elastīgais elements parasti ir ietverts caurulē, kuras viens gals ir fiksēts nekustīgi, bet otrs ir savienots ar leņķiskās nobīdes sensoru, kas mēra novirzes leņķi starp caurules galiem un deformējamo elementu.
Tādējādi tiek iegūts signāls, kas nes informāciju par griezes momenta lielumu.Lai noņemtu signālu no atsperes, deformācijas pretestības elementa vadi ir savienoti ar slīdgredzeniem ar sukām.
Magnetostriktīvā spēka sensori
Ir arī spēka sensori ar deformācijas mērierīces magnetostriktīviem devējiem. Izmantots šeit apgrieztā magnetostrikcijas parādība (Villari efekts), kas sastāv no tā, ka, pieliekot spiedienu uz kodolu, kas izgatavots no dzelzs-niķeļa sakausējuma (piemēram, permaloīda), mainās tā magnētiskā caurlaidība.
Kodola gareniskā saspiešana noved pie izplešanās tās histerēzes cilpas, samazinās cilpas stāvums, kas noved pie magnētiskās caurlaidības vērtības samazināšanās, attiecīgi - līdz sensora tinumu induktivitātes vai savstarpējās induktivitātes samazināšanās.
Tā kā magnētiskie raksturlielumi ir nelineāri un arī tāpēc, ka tos būtiski ietekmē temperatūra, rodas nepieciešamība izmantot kompensācijas ķēdi.
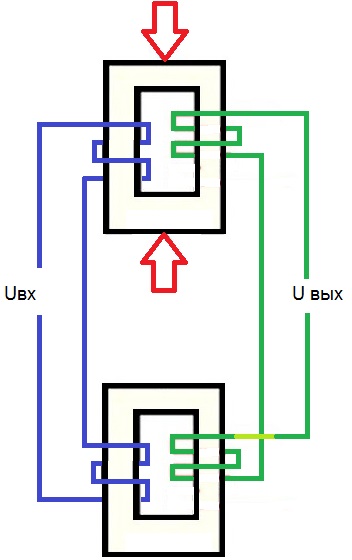
Uz kompensāciju attiecas šāda vispārīgā shēma. Slēgts magnetostriktīvs magnētiskais kodols, kas izgatavots no niķeļa-cinka ferīta, tiek pakļauts izmērāmam spēkam. Šādam kodolam nav spēka spiediena, bet abu vadu tinumi ir savienoti viens ar otru, tāpēc notiek kopējā EML izmaiņas.
Primārie tinumi ir identiski un virknē savienoti, tie tiek darbināti ar maiņstrāvu ar frekvenci desmit kilohercu robežās, savukārt sekundārie tinumi (arī vienādi) ir ieslēgti pretēji, un, ja nav deformējoša spēka, kopējais EMF ir 0. Ja spiediens uz pirmo serdi ir palielinājies, kopējais EML izejā nav nulle un proporcionāls deformācijai.